【能源人都在看,点击右上角加'关注'】

导读
为了减小模型参数发生变化带来的影响,提高锂电池荷电状态(SOC)的估计精度,提出了一种改进的扩展卡尔曼滤波算法(I-EKF)。
电池荷电状态(SOC)的定义是电池剩余电量占可用总电量的百分比。实时准确地估计电池的SOC,对于防止电池过充和过放、延长电池使用寿命、提高整车性能和安全性具有重要意义。
目前,常用的SOC估计方法主要有:(1)开路电压法[1-2],此方法精度较高,但是由于准确的开路电压需将电池长时间静置才能得到,不适用于动态估计;(2)安时积分法[3-9],该方法一般配合开路电压法使用,先用开路电压法估计电池的SOC初始值,然后再使用安时积分法实时估计电池的SOC值;(3)神经网络算法,可实时进行SOC估计,适用性广且精度较高,但是此方法需要大量样本数据进行网络训练,其估计精度受训练数据和训练方法的影响较大;(4)卡尔曼滤波算法[10-15],通过建立电池模型实现状态空间描述,再使用卡尔曼滤波器对状态量进行估计,该方法是一种自回归数据处理算法,其核心思想是对动态系统的状态做最小均方意义上的最优估计,因此其估计精度比较高,但是其对电池模型的精度要求也比较高,同时由于该方法运算量较大,算法较为复杂,对系统处理器的要求也较高。
传统的扩展卡尔曼滤波算法(EKF)算法是采用固定的模型参数进行SOC估计,在电池放电末期,电池极化作用会导致电池的模型参数发生变化,此时用传统的EKF算法估计SOC,尾端的误差将会变大。本文提出了一种改进的扩展卡尔曼滤波算法,先利用遗忘因子最小二乘法估计电池模型参数,再将估计的模型参数与电池电压、电流进行局部加权回归(Lowess)拟合,用拟合的函数计算每组电压、电流所对应的模型参数,以此减小模型参数变化带来的影响。
电池建模与参数辨识
1.1 电池建模
等效电路模型是利用电气电路模拟电池的工作特性,其特点是便于数学分析、进行参数辨识。等效电路模型中经常使用的是Thevenin等效电路模型,该模型结构简单,能够很好地模拟电池充放电特性,其电路图如图1所示。

图1 Thevenin等效电路模型
图1中,Uoc为开路电压(OCV),U为电池端电压,R0为电池内阻,I为电池电流,R1、C1分别为电化学极化内阻和极化电容,U1为RC回路的端电压。由图1模型可得电路方程:
安时积分法的公式为:
式中:QN为电池额定容量;I为电池电流,放电为正,充电为负;SOC(t0)为t0时刻的SOC值;η为库仑效率系数,其定义为:
式中:QI为当前电流I下的实际总容量,I越小,实际总容量越大,I越大,实际总容量越小。所以式(2)可以写为:
将式(1)、(3)进行离散化处理,得到系统的状态空间方程和观测方程:
式中:T为采样时间;Uoc是Uoc关于SOC的函数;wk为系统噪声,vk为观测噪声,它们是均值为零、协方差分别为Q和R的高斯白噪声。
1.2 遗忘因子最小二乘法
在参数辨识的众多理论方法之中[16-18],最小二乘法凭借原理简单、收敛速度快、容易编程等优点,被广泛应用于系统的参数辨识中。而遗忘因子最小二乘法是在递推最小二乘法的基础上增加了一个遗忘因子λ,使得最小二乘法具有辨识时变参数的能力,遗忘因子最小二乘法的原理公式为:
式中:φk为数据向量;yk为系统输出;θk为待估参数向量。设估计参数向量为
,第k次观测的估计输出为:
遗忘因子最小二乘估计参数
的递推公式[19]为:

式中:I为单位矩阵。
遗忘因子λ取值越小,算法追踪时变参数的能力越强,但是其辨识结果波动也越大;λ取值越大,其辨识结果波动越小,但是追踪时变参数的能力越弱,当λ=1时,算法就变为普通的递推最小二乘法。
1.3 电池模型参数辨识
由式(1)的离散化方程可得:
将式(6)中第二个等式带入第一个等式中,可得:

整理式(7),可得:

令
式(8)可写为:
令
即可求得参数k1、k2、k3的值,进而可以求得卡尔曼滤波算法所需矩阵。
搭建的实验平台框架图如图2所示,主要由锂电池、恒温箱、充放电设备和控制计算机构成。

图2 电池实验平台框架图
用搭建的实验平台模拟动态应力实验工况(DST)工况进行放电实验,得到图3~图4所示的放电数据。OCV-SOC特征曲线通过脉冲功率特性实验获得,具体过程为:25 ℃环境中1 A恒流放电,放电时间为720 s,静置7 200 s,确保端电压变化率小于1 mV/min。记录静置后得到的开路电压和与之对应的SOC值,利用多项式拟合得到OCV-SOC特征曲线,其拟合曲线如图5所示。

拟合曲线的函数关系式为:
式中:x表示SOC。将Uoc(x)函数求导得到其导函数:
将利用函数关系求得的开路电压Uoc和图3~图4所示的DST工况数据带入辨识参数的具体步骤中,可以得到k1、k2、k3三组数据。利用Matlab拟合工具箱里的局部加权回归法将这三组数据分别与DST工况的电压、电流进行拟合,得到拟合函数f1(Uk, Ik),f2(Uk, Ik),f3(Uk, Ik)。由于改进的扩展卡尔曼算法不是用固定的模型参数进行SOC估计,遗忘因子的选取不需要考虑其辨识结果的波动性,可以根据测试选取估计精度较高的值。
建立I-EKF算法
2.1 算法的建立
锂离子电池放电末期,由于极化反应,电池模型参数会发生变化。而卡尔曼滤波算法的估计精度取决于所建模型的精度,如若采用固定的模型参数进行算法估计,当电池的模型参数变化后,SOC的估计误差将会变大。I-EKF算法采用的是时变的模型参数,通过拟合模型参数与电池电压、电流的关系,求出每个时刻的电压、电流所对应的模型参数,以时变的模型参数进行估计,减小模型参数变化带来的影响。
由前文可知:
所以系统的状态空间方程和观测方程可以写成:

由式(10)可得,I-EKF算法所需矩阵为:

算法的具体步骤为:
(1)变量初始化:
(2)更新时间:

(3)计算滤波增益:
(4)k时刻最优估计:
式中:Uk为k时刻的电池端电压测量值。
(5)更新滤波均方差:
式中:I为单位矩阵
2.2 算法的验证分析
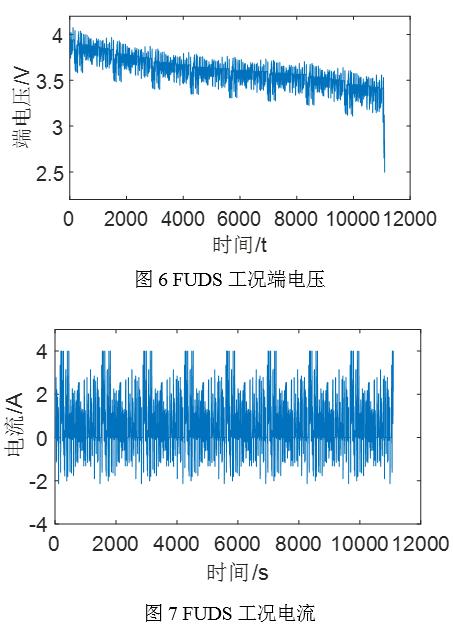
利用搭建的实验平台模拟美国联邦城市驾驶工况(FUDS)工况进行放电实验,得到模拟的FUDS工况数据,其电压和电流数据如图6~图7所示,SOC的起始值设置为0.8。将模拟的FUDS工况电压、电流数据带入I-EKF算法的具体步骤,就可以估计出锂电池的SOC值。
定义SOC误差为:SOC误差=SOC估-SOC实。为了验证算法的鲁棒性,在变量初始化中,变量之一的SOC初始值设置为0.4,与实际值的误差为40%。图8是I-EKF估计的SOC、传统EKF估计的SOC与SOC参考值的对比图。图9是I-EKF的SOC估计误差与传统EKF的SOC估计误差对比图。

由图8~图9可知,两种算法的鲁棒性都很好,在初始误差达到40%的情况下,SOC的估计误差能在50次递推次数以内收敛到5%附近;在图8中,传统EKF算法的估计值在放电末期明显地开始偏离参考值;在图9中,EKF算法在进入放电末期之前的估计误差基本在0.5%内,而在放电末期误差则上升到2%附近,这是电池模型参数变化导致的结果,而I-EKF算法则减小了这种误差,I-EKF的估计误差在收敛过后基本稳定在0.5%以内,放电末期也没有太大的变化,相比于传统EKF算法,I-EKF算法受模型参数变化的影响较小。
结 论
由于电池放电末期的极化反应导致电池模型参数发生变化,受模型精度影响较大的传统EKF算法在参数变化后,其估计误差将会变大。为了减小模型参数变化对算法估计精度的影响,本文建立了模型参数实时变化的I-EKF算法来估计电池的SOC值,并与传统EKF算法进行比较。两种算法的鲁棒性很好,在初始误差达到40%的情况下,能够快速将误差收敛到5%以内。电池放电末期,EKF算法的估计误差开始变大,误差最大值接近2%;而I-EKF算法的估计误差基本稳定在0.5%以内,误差最大值也在0.5%附近。在模型参数发生变化的情况下,I-EKF算法比传统EKF算法更具有优势,受模型参数变化的影响更小,其估计精度更加稳定。
参考文献:
[1]LEE S, KIM J, LEE J, et al. State-of-charge and capacity estimation oflithium-ion battery using a new open-circuit voltage versus state-of-charge[J].Journal of Power Sources, 2008, 185: 1367-1373.
[2]邓晔,胡越黎,滕华强.锂电池开路电压的预估及SOC估算[J].仪表技术,2015(2):21-24.
[3]蒋光兵.AGV能量管理系统设计与实现[D].重庆:西南大学,2007.
[4]赵娜.BMS中SOC估算与主动均衡控制策略的研究[D].北京:北京交通大学,2017.
[5]鲍慧,于洋.基于安时积分法的电池SOC估算误差校正[J].计算机仿真,2013,30(11):148-151,159.
[6]范兴明,曾求勇,张鑫.基于改进安时积分法的电动汽车电池SOC估计与仿真研究[J].电气应用,2015,34(8):111-115.
[7]杨文荣,朱赛飞,陈阳,等.基于改进安时积分法估计锂离子电池组SOC[J].电源技术,2018,42(2):183-184,246.
[8]邓涛,孙欢.锂离子电池新型SOC安时积分实时估算方法[J].重庆理工大学学报,2015,29(1):101-106.
[9]林成涛,陈全世,王军平,等.用改进的安时计量法估计电动汽车动力电池SOC[J].清华大学学报,2006,46(2):247-251.
[10]方明杰,王群京.基于扩展卡尔曼滤波算法的锂离子电池的SOC估算[J].电工电能新技术,2013,32(2):39-42,62.
[11]Hu C, Youn B D, Chung J. A multiscale framework with extended Kalman filter forlithium-ion battery SOC and capacityestimation[J]. Applied Energy, 2012, 92: 694-704.
[12]Sun F c, Hu X s, Zou Y, et al. Adaptive unscented Kalman filtering for state ofcharge estimation of a lithium-ion battery for electric vehicles[J]. Energy, 2011, 36: 3531-3540.
[13]李晓红.动力电池管理系统SOC估算研究及软件设计[D].武汉:武汉理工大学,2011.
[14]郭向伟,华显,付子义,等.模型参数优化的卡尔曼滤波SOC估计[J].电子测量与仪器学报,2018,32(8):186-192.
[15]徐洪超,沈锦飞.基于EKF-Ah-OCV的锂电池SOC估算策略[J].江南大学学报,2015,14(1):64-68.
[16]章群,严世榕.电动汽车动力锂电池模型参数辨识[J].机电工程,2016,33(12):1506-1510.
[17]李思.电动汽车锂离子电池等效电路模型的参数辨识研究[D].北京:北京理工大学,2015.
[18]孙涛,龚国庆,陈勇.锂电池参数辨识模型的设计与研究[J].电子技术应用,2019,45(3):127-130.
[19]康燕琼.纯电动汽车锂电池组健康状态(SOH)的估计研究[D].北京:北京交通大学,2015.
免责声明:以上内容转载自电池中国,所发内容不代表本平台立场。
全国能源信息平台010-65367702,邮箱:hz@people-energy.com.cn,地址:北京市朝阳区金台西路2号人民日报社
,




