上一期为大家介绍了PD/PS软件机器人仿真项目中标准操作库的创建,焊接零件、焊点信息分配到工作站。本期再来为大家介绍一下工作文件夹设置、装配树添加、仿真资源结构创建与资源分配、机器人工作站数模Layout布局以及示教文件的创建。
使用软件版本:PD/PS14.0.2。
一、设置工作文件夹机器人仿真工作站工作文件夹设置包含工作文件夹的设置与装配树的添加两个部分。
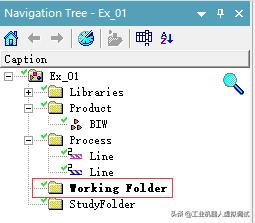
1.左侧项目树中点选工作文件夹目录Working Folder,在Home菜单下点击“Set Working Folder”命令按钮,设置Working Folder文件为工作文件夹。设置成功之后,文件目录名称自动加黑加粗显示。
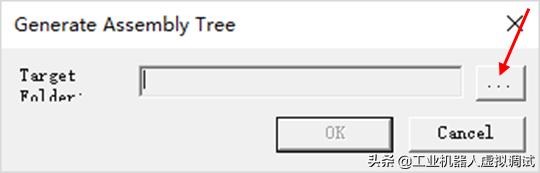
2.左侧项目树中Process下右击粉色的工艺树Line,然后在Special Data菜单下点击“Generate Assembly Tree”命令按钮,在弹出的Generate Assembly Tree对话框中Target Folder后点击浏览文件按钮。
3.在弹出Target Folder对话框,点选刚设置的工作文件夹Working Folder,点击OK按钮。
4.此时选定的工作文件夹Working Folder在Generate Assembly Tree对话框中Target Folder后的输入框中显示,点击OK按钮。
5.弹出装配树已经创建成功提示框,点击确定按钮,项目装配树创建完成。
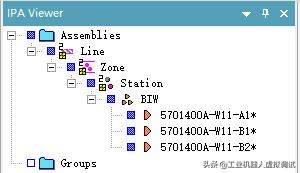
6.左侧项目树中工作文件夹Working Folder下右击装配树Line目录,在弹出的快捷菜单中点选“Add Root”,将装配树目录加载进来。然后在Home菜单下,“Viewers”命令按钮的下拉菜单下点击“IPA Viewer”,在弹出的IPA Viewer窗口中展开装配树可以查看项目的装配结构。
二、资源分配到资源文件
机器人仿真工作站资源分配到资源文件包含资源结构文件目录的创建与仿真资源分配两个部分。
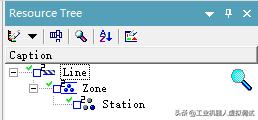
1.左侧项目树中工艺文件目录Process下右击蓝色资源树文件Line,在弹出的快捷菜单中点选“Add Root”,将资源树目录加载进来,此时右侧Resource Tree窗口中显示创建的资源文件。
2.点选资源树目录下的工作站目录Station,Home菜单下使用“New”命令新建4个CompoundResource文件。
3.将创建的4CompoundResource文件分别重命名为Robot、Fixture、Equipment、Layout,作为机器人资源节点、工装夹具资源节点、周边设备资源节点、布局图资源节点。
4.左侧项目树库文件目录Libraries下双击资源库文件EngineeringResourceLibrary,然后将其展开。
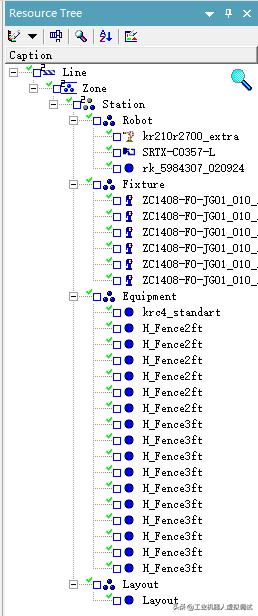
5.在展开的资源库目录中分别拖拽1个机器人资源kr210r2700_extra、1个焊枪资源SRTX-C0357-L、1个机器人Base资源rk_5984307_020924到右侧资源树目录下的Robot资源节点下。
6.左侧资源树下将机器人资源节点Robot勾选后,可以看到机器人数模、机器人Base数模、焊枪数模在软件工作区中显示。
7.参考上述步骤,将夹具资源全部拖拽到工装夹具资源节点Fixture下,在周边设备资源节点Equipment下分别拖拽1个机器人控制柜资源krc4_standart、6个短安全围栏资源
H_Fence2ft、10个长安全围栏资源H_Fence3ft,在布局图资源节点Layout下拖拽1个布局图Layout。
三、工作站布局
机器人仿真工作站Layout布局使用Relocate与Placement Manipulator命令配合完成。Placement Manipulator命令是直接对数模进行平移与旋转操作,Relocate命令是通过拾数模放特征完成摆放操作,使用最多的是拾取圆形数模的中心点特征、拾取矩形的直角特征两种方法,以下分别详细介绍。
1.右侧资源树窗口中分别勾选布局图资源Layout、机器人资源节点Robot下的机器人Base资源,使得机器人工作站布局图数模与机器人Base数模在软件工作区中显示。
2.在资源数模摆放之前首先在快捷工具栏中的View Style工具条中点选“Feature Lines Over Solid”命令按钮,在资源数模上显示边缘线特征,以便于点选布局参考特征要素。
3.右侧资源树对话框中点选显示出来的机器人Base数模,然后在快捷工具栏中点击“Relocate”命令按钮,或者直接使用快捷键Alt R,弹出Relocate对话框。
4.在弹出的Relocate对话框中From frame后点击小三角,然后点选“frame by circle center”,即选取圆中心特征为参考坐标系。
5.在机器人Base数模的底部圆形边缘上点选三个点(间隔距离尽量大一些),三点坐标值在Frame By 3 Point Circle Center对话框中显示。同样的步骤为Relocate对话框中的To frame选取Layout数模上机器人Base摆放位置处的圆形边缘三个点,全部选取完成后,软件工作区出现数模位置移动指引黄色线段。
6.在Relocate对话框中点击Apply按钮,机器人Base数模移动到摆放位置处,点击Close按钮,关闭Relocate对话框。
7.显示机器人数模,参数上述步骤,将机器人数模摆放到机器人Base数模上。若是使用Relocate命令摆放后机器人姿态不正确,可以使用快捷工具栏中的“Placement Manipulator”命令按钮,或是直接使用快捷键Alt P,在弹出的Placement Manipulator对话框中使用Translate(平移)功能或Rotate(旋转)功能对机器人数模姿态进行微调整,以便达到满意的摆放效果。
8.右侧资源树窗口中勾选工装夹具资源文件目录Fixture,并将其点选。首先使用Placement Manipulator命令将夹具数模姿态调整到与Layout中夹具摆放姿态大致相同。点击“Relocate”命令按钮,在弹出的Relocate对话框中From frame后点击小三角,然后点选“frame by 3 points”,即选取三点创建参考坐标系。
9.在夹具数模的安装支座直角边缘上按顺序点选三个特征点,三点坐标值在Frame By 3 Points对话框中显示。同样的步骤为Relocate对话框中的To frame选取Layout数模上夹具摆放位置处的支座直角边缘上三个点,全部选取完成后,软件工作区夹具数模上出现绿色参考坐标系,Layout数模上出现红色参考坐标系,同时出现夹具摆放黄色移动指引线。
10.在Relocate对话框中点击Apply按钮,夹具数模移动到摆放位置处,点击Close按钮,关闭Relocate对话框。
11.参考上述步骤,将机器人工作站中的其他数模资源摆放到Layout中相应的位置处,摆放完成后,在快捷工具栏View Style工具条中点击“Shaded Mode”命令按钮,工作站资源数模恢复原始显示模式,完整机器人工作站效果如下图所示。
四、创建示教文件
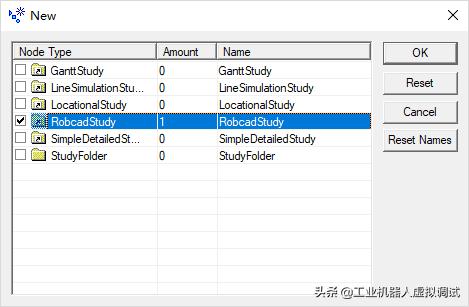
1.左侧项目树中点选示教文件目录StudyFolder,然后在Home菜单下点击“New”命令按钮,在弹出的New对话框中勾选“RobcadStudy”,点击OK按钮,在示教文件目录下创建一个机器人示教文件。
2.左侧项目树中点选Process下的粉色工艺文件目录Line,然后点击“Navigation Tree”命令按钮,将工艺文件在另一个窗口中打开。拖拽其下的工作站目录Station到新创建的机器人示教文件目录下。
注:由于我们演示的只是机器人工作站仿真,因此这里只拖拽了工作站工艺文件Station到机器人示教文件目录中。若是仿真的是多工作站组成的工作区域,那么此时就应该拖拽工作区域文件Zone到机器人示教文件目录中。当然,若是仿真线体就需要拖拽生产线工艺文件Line到机器人示教文件目录中。
3.至此,机器人仿真工作站在Process Designer软件中的操作全部完成,点击“Save Scenario”命令按钮,在弹出的保存场景提示框中点击是按钮,保存机器人仿真工作站创建进度。
上一篇:PDPS软件:机器人标准操作库创建以及工件、焊点信息分配到工作站
The End
本文由工业机器人虚拟调试原创,欢迎关注,带你一起长知识!
,