这次我们就一起看懂自动驾驶的眼睛——传感器。
特别提示:本篇很长,内容很干,预计阅读时间20分钟以上,可先收藏,为年后储粮。

从波说起
我们把传感器比作机器的眼睛,那就先来看人眼如何看世界。上帝说“要有光,于是就有了光”。我们能看见这个世界,是因为我们能看到光;准确的说,是可见光照射到物体上,再反射到眼睛里,被我们“看见”。那么究竟什么是光呢?
1. 光是一种波
被中学物理虐过的同学可能还记得,光也是一种电磁波。关于光的波动属性,你一定见过这个公式:
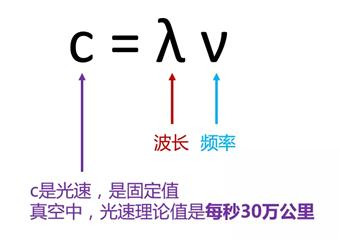
几乎所有关于波的奥秘,都是基于这个公式。我们来回顾下:电磁波的传播速度都是恒定的,即等式左端的C,真空理论值每秒30万公里,这也是爱因斯坦爷爷推导的自然界物理运动的速度极值,“超光速会形成黑洞”。
既然速度相同,决定电磁波差异的就在等式的右端了,即波长和频率的反比关系。电磁波谱就是按照电磁波的波长或频率关系,给光波排座次。

电磁波谱从左向右,波长依次增加,频率依次减小。位于频谱中间位置的窄窄一条就是可见光所在的位置,是人眼视觉神经可以感受到的电磁波,对应波长在400nm~760nm(这个单位叫“纳米”),是人眼能够看到世界的原因。可见光也不是单一颜色的,波长由长到短依次为赤橙黄绿青兰紫。
对于机器而言,就不会受制于用可见光的波段看世界,整个电磁波谱上的波段都可以为之所用。更厉害的是,人的眼睛不具备光的发射功能,只能被动接受反射光;而机器之眼传感器还可以主动发射光波,自造反射光。

2. 波的性质影响传感器
既然光是一种电磁波,波的性质就深刻影响了传感器的性质。影响传感器性质的波的属性主要有:
(1)电磁波波长越长,绕射能力越强。这个理论来自波的衍射原理,波可以绕过小于自己波长的障碍物。因此利用波长较长频段的传感器,可以在空气中有云雨雾雪大分子障碍物时使用。
(2)电磁波波长越短,分辨率越高;而分辨率越高,意味着对应传感器在距离、速度、角度上的测量精度更高。
3. 波能当做测量尺
波有个用处,可以当做尺子,探测物体的距离和速度。
测距:波的测距通常有两种方式,一种是计算从发射波到接受到反射波所耗费的时间,就像波进行了折返跑;另一种是对比反射波和发射波波形的变化,推算出距离。

测速:也可以分为两种方案,一种是基于测距实现,即以一定时间间隔连续测量目标距离,用两次目标距离差值除以时间得到速度,这种适用于测量反射波比较强烈的目标。另一种是利用“多普勒频移”实现,所谓“多普勒频移”是指由于目标物体的移动,回波信号与发射信号之间会产生一个频率差。通过分析频率差特征计算速度。
了解了电磁波,我们就来看自动驾驶如何利用电磁波的特性,以传感器为眼看世界。这里主要介绍自动驾驶的三大主力传感器:激光雷达、毫米波雷达、摄像头。
三大主流传感器
传感器作为机器之眼,功能就是获得清晰的环境信息。其评判维度可以分为看的远(探测距离),看的清(分辨率&图像信息),稳定性(不同环境表现&耐用性)。
目前自动驾驶测试车上主流配置是激光雷达 毫米波雷达 摄像头,三种传感器在信息获取维度及使用场景上形成互补,协作感知环境。我们分别看看三大主流传感器的表现。


1. 激光雷达--探测距离远,精度高,天气影响大
激光雷达是一种主动传感器,主动发射电磁波激光束,探测反射波,通过计算反射时间和反射波特征探测目标的距离和速度等信息。

激光其实是一种人造光,是人工激发原子后辐射的光。用在无人车上的激光雷达,一般使用的是近红外波段。比起普通光源,激光波长的分布非常窄(单色性好),亮度高,并且非常有纪律性,光呈“束状”朝向一个方向射去,不会散乱,不会像水波一样四向辐射。
但线状“激光束”如何探测一个平面上不同方位?转起来是个好办法。目前已经应用的激光雷达采用机械转动的方法解决这个问题。在描述机械式激光雷达时,还会提到“线”的概念。所谓线,是指水平垂直面上有多少激光束。这衡量了激光雷达探测垂直角度的能力。

如果你见过L3以上级别的无人车,车顶上不停旋转的装置就是激光雷达。当然如果你买过扫地机器人,顶上凸出来的观望台就是一个单线的激光雷达。单线激光雷达即只能发射一条激光束的雷达,观望台里机械装置在不停转动,实现360度扫描环境。

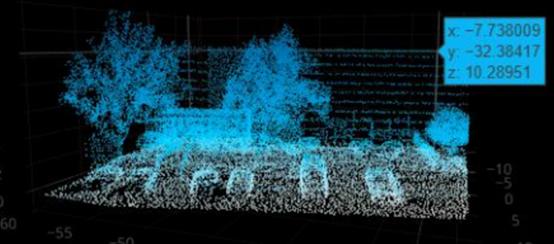
激光雷达在探测环境时,可以看成是长度几十米到几百米的可以自动发射回收的尺子,遇到障碍物即收回报告障碍物距离,误差最小可以做到几厘米。这把伸缩尺不但能够探测到障碍物的位置信息,还能通过回收不同方向各点激光尺的报告信息,以点成线,以线成面形成障碍物“点云”图像。
但和我们眼睛里的图像不同的是,点云是根据障碍物位置信息聚合的,只能显示形状,几乎不能区分颜色。比如探测到交通指示牌,通过点云描绘的形状,可以判断障碍物是个交通指示牌,但交通指示牌上标识图像和文字等信息,激光雷达是无能为力的。
激光雷达是把好尺子,但也有弱点。激光雷达在不良天气下的表现不佳,由于波长多在近红外,相对小,不能绕过空气中大分子障碍物,因而雨雪烟雾都会对激光尺造成阻挡。
还有一点是价格昂贵,比如市面上多数扫地机器人采用了激光雷达感知方案,尽管使用结构最简单的单线激光雷达,仍然占了整机成本很大部分。Google测试无人车Waymo使用的3个64线激光雷达价格约22万美元。好在L3之前激光雷达还不是必需品,留给了市场时间和机会,乐观认为2020年符合自动驾驶需求的激光雷达价格可以降到1000元。
2. 毫米波雷达—全天候服务,但精度相对低
和激光雷达一样,毫米波雷达也是主动发出电磁波;但不同于“激光束”,毫米波雷达发出的毫米波是一个锥状的波束。毫米波频段30-300GHz,对应波长为1-10mm,比激光雷达使用的波长长,对应的,具备了绕物能力,但精度下降。

但毫米波频段中很多频率区域的电磁波在空气中容易被水离子、氧气吸收,所以可用的频段需要筛选,目前开放给民用的可用频段是24GHz,60GHz,77GHz和120Ghz几段,24GHz传感器已经在ADAS并线辅助等功能中大规模应用。

毫米波波长长,绕物能力好,是否看到了毫米波雷达最大的优势?受天气和环境的影响最小,能在云雨雾雪天气中使用(大雨除外),是各类传感器中全天候性能最好的。
“上帝打开了毫米波雷达的一扇窗,同时也关上了一扇门”,毫米波由于波长太长,探测精度大大下降,不能清晰呈现目标物点云。为了提升毫米波雷达的探测精度,行业重点也由24GHz雷达向77GHz/79GHz雷达发展。
3. 摄像头—最像人的眼睛
摄像头大家都很熟悉了,不熟悉的同学请拿起手机自拍。和激光雷达、毫米波雷达主动发出电磁波不同,摄像头是像人眼一样,被动地接收可见光。
应用于自动驾驶的摄像头负责采集图像信息。相比其他传感器的优势很明显,是唯一可以读取“内容”信息的传感器,障碍物类型、交通标识、信号灯颜色通通归他搞定,所见即所得。
摄像头劣势也很显著,一是识别所消耗的算力巨大,并且识别率不能保证100%(目前识别率约95%),仍需大量数据训练提升;二是摄像头成像是将三维世界映射成二维照片,丢失了深度信息,不能直接给出距离,只能靠算法解决,进一步增加了对算力的要求。

一般来说,只有一个摄像头(单目)的时候采用近大远小原则测距,结合传感器尺寸,通过对比图片中物体的像素大小和样本库中相同物体大小,估算目标距离,这就要求在估算距离之前首先对目标进行准确识别,还要不断维护一个带真实尺寸信息的样本特征数据库。

而双目摄像头(带2个摄像头)的检测方式是通过对两幅图像的视差进行计算,无需进行目标物图像识别,更像人的眼睛。

这里列表总结三大传感器的特性。

辅助传感器
虽然三大传感器的功能已经很强大,仍需一些辅助传感器配合,加强感知能力,应对不同场景。这里来简单来看三大传感器的常用僚机:红外传感器、超声波传感器、惯导。

1. 红外传感器---夜视王者
电影中常有主角带着红外眼镜不换弹夹杀敌三千的场景,红外为什么这么神奇?其实任何具有一定温度的物质都能辐射红外线,红外传感器通过测量目标与背景间的红外线差,将测量信息处理转化为图像信息。在光线不足或恶劣天气场景,红外传感器依然可以检测到摄像头和激光雷达不能识别的物体。

2. 超声波雷达
跟激光和毫米波雷达应用电磁波不同,超声波雷达通过发出超声波信号(是声波而非电磁波)并记录反射时间,运用声速(真空中约340m/s)计算物体距离。
超声波雷达已经在倒车雷达中大规模应用,主要由于超声波测距方法简单,成本低。但超声波雷达测距短、误差大、精度低,导致了应用场景的局限性。
3. 惯导
惯导(INS)全称是惯性导航系统,不要依赖外部信息,通过测量自身运动的方向和加速度,计算运动的速度、角度和位置信息,从而推算自身位置。举个栗子,我们在房间中闭上眼走路,通过心中计算走过的步数和转向的角度估计走动的大体距离。
惯导的优点很突出:不需要依赖于外部信息,不受环境和天气的影响;但惯导的缺点也很明显,定位误差会随时间而增大,工作之前需要校准。另外,符合自动驾驶要求精度的惯导价格很高,达到20万元人民币。
结语&柯基问答
以上展示了各类传感器的优缺点,受限于传感器特性及成本因素,主流传感器融合方案集中于(激光雷达 毫米波雷达 摄像头),激光雷达提供精度信息,毫米波雷达辅助全天候工作,摄像头提供内容信息。但自动驾驶对安全度和稳定性要求极高,需要各类型传感器补充信息,哪怕是冗余。
在新春佳节来临之际,柯基给读友们拜年,愿“时间有效率,时代有思考,猪事顺利,关注科技柯基”。柯基还把祝福语写在了自动驾驶专用道路旁的广告牌上,那么问题来了,当自动驾驶车呼啸而过时,
能够认清广告牌形状的是哪只眼睛呢? 多选
0人 0%
激光雷达
0人 0%
毫米波雷达
0人 0%
摄像头
0人 0%
红外传感器
0人 0%
送祝福,求关注,心意送到,形状不重要
如果您对我们的服务还满意,请关注
“从0到1看科技”
,




