
Betaflight 4.0.0最新固件
兔蛋针对各项新功能的理解和调整
前提:
首先保证安装好最新版10.5.1以上的BF调参软件,否则很多功能无法调整,甚至会出错。
刷好了对应自己飞控型号的BF 4.0.0固件(还真不是废话,有些朋友真的会刷错)。
个人感觉需要重视的调整:
一、新增D MIN功能:
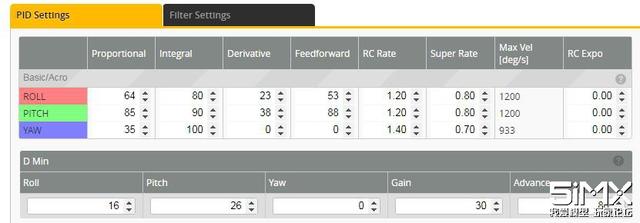
我们都知道PID里的D值非常重要,太小容易在快速改变姿态后不能立即锁定回弹,还容易产生洗桨震荡;太大会让陀螺仪噪音更多,电机更热,延迟更大,甚至反而产生更大的回弹;刚刚好的D值可以让锁定能力和延迟响应达到最优的平衡。但是穿越机的姿态是非常复杂多变的,如果能在我们平稳飞行时自动降低D值(因为此时不需要太强的锁定能力),能在快速翻滚类的大动作和洗桨时自动提高D值(让锁定能力突然变得更强),岂不是可以更完美的发挥D值的作用吗?D MIN这个功能就是可以让我们的D值随姿态而动态化。
特别要注意的是,此功能默认是开启的,而且可以看到新固件默认PID里的D值也比以前大了很多。按照官方介绍适合花式飞行套用的公式,比如:我以前ROLL方向正常的D值是20,那么如果我开启D MIN功能后的D要设置为23左右(增大10-20%),D MIN值要设置为16左右(减小到80%),那么在我平稳飞行时D有效值只有15,洗桨和快速翻滚时会自动达到正常的20,甚至峰值的23。PITCH方向同理。YAW的D必须为0,所以D MIN也必须为0。所以理论上看开启D MIN后,平稳飞行时可以让电机温度更低,响应更快,翻滚后锁定能力也更好。Gain增益值代表增加D时候的强度,越高表现为越容易到达D的最大值,默认值为27,适合绝大部分飞机,但我经常做翻滚动作,所以更希望D大多数时候能偏向最大值,保持良好的锁定,所以我设置为30。Advance高级值代表增加D值瞬间的响应速度,默认为20,官方建议如果是高曲线角速度,打杆翻滚超快的用户要改大点来让D的增加值跟上你的速度,根据我自己的飞行风格,我调为80。
经过我这段时间的实际飞行,ROLL和PITCH轴锁定都很好,感觉基本和我以前的手感一致。如果实在感觉不习惯D MIN的效果,也可以关闭它,使用老版本的D值。如果要关闭D MIN功能,D MIN 所有方向的数值都改为0即可。
二、YAW轴PIDF新算法:

改进后的YAW的PIDF数值与以前老版的调整方法有很大不同,官方建议默认的35 100 0 0就已经适合绝大多数的飞机。保持默认经过我飞行后查看黑匣子,YAW方向的阶跃图非常的完美,几乎和ROLL和PITCH方向一样。要知道老版本YAW的P值我曾今为170,I值为120,这么高的值都不是太完美。可见如今YAW的新算法真的很给力。
另外YAW还有另一套算法(整合式YAW),据官方宣传也是非常给力的,个人暂时没有实践。需要注意的是,改进后的YAW新算法和整合式YAW是完全不同的,不要搞混了。
三、TPA的算法改变:

旧版本的TPA是在高油门时同时衰减P和D值,来改善高油门的震荡效果。据官方研究发现,高油门产生震荡和P的关系不大,主要是D的噪音。所以全新的TPA会默认只衰减D,而P保持不动,这样也可以保持高油门飞机的响应。而且默认值也被设置成了0.5 1500。因为TPA本身就是给高油门有抖动的飞机来用的,我的飞机基本不存在这个问题,官方也建议花式飞机不需要太高的TPA,默认的0.51500更适合竞速机,所以我依然将数值恢复为老版的0.1 1650,让D保持更好的锁定稳定效果。
这里想说个问题,可能很多人比较依赖TPA,感觉TPA就一定能解决抖动问题。其实我认为大部分的抖动都起源于飞机本身的装机工艺,设备动平衡质量差,减震不完善等,BF目前默认的滤波也足矣过滤掉大部分的抖动。所以你的飞机如果还是有抖动,多从你的硬件查查,TPA真的是下策。
四、全新概念的滤波器:


“动态的低通陀螺仪滤波”和“动态的Dterm低通滤波”。引入了转速滤波的概念,可以让高油门时的滤波效果更好,减少延时和洗桨。以前的动态陷波滤波器也得到了优化,延迟同样也变小了。官方建议保持原厂默认的滤波设置就可以了,完全适用于全大多数的飞机。如果你的飞机还是抖,那肯定是硬件的问题了。如果你的电机很凉飞行很顺,可以适当增加动态最低值,减小延迟。官方只是建议花式飞行的飞机,可以将Dterm低通2的类型改为PT1,数值改为200即可。如果黑匣子查看Dterm噪音依然很小,还可以再调高一点数值。
我按照官方给出的建议参数飞了几个电,发现电机的温度跟没飞一样,非常凉,而且发现有一定的洗桨。因为我飞机的硬件还是比较过关的,所以我继续放宽了滤波,把陀螺仪动态低通滤波最低值提高到200,把Dterm低通2的数值提升到250,后继续试飞发现洗桨果然少了很多,但是电机稍微有一些发热,大概在40度左右,查看黑匣子也基本和以前一样,几乎没有噪音,非常理想。所以这也可以看出滤波的松紧宽度直接影响到洗桨程度和电机温度。如果你的硬件不好,只能用更紧的滤波带来平稳,但洗桨等手感就会变得不好。如果你的硬件很好,没有抖动,便可以放宽滤波,而带来更小的洗桨和手感响应。
至于全新的“转速滤波器”,官方宣称确实效果很好,可以完全去除陀螺仪所有滤波器,极大化减小洗桨和延时。但是我认为弊端就是目前要求太苛刻:只支持32为电调,电调要最新的测试固件,不能使用电调启动音,最大只支持双4K刷新率,还要手动开启并设置一些细节参数等等。所以我个人认为目前还不够成熟,不推荐稳定使用。
五、不再支持陀螺仪开启32K的刷新率:
需要注意的是并不是说搭载ICM20602、ICM20689或MPU6500等陀螺仪的飞控不能用了,他们依然可以开到8K来使用。按BF官方的大量数据证明,这类陀螺仪开到16K、32K的综合性能并不比8K高,甚至更差。我们都知道这类陀螺仪开到32K后,必须要求极高的物理减震和更多的软件滤波才能保证他良好的运行,不然飞机就会抖动,然而越多的滤波反而会让飞机的延迟越大。32K确实表面上比8K快了很多,但与滤波的延迟综合下来,响应反而是降低了的。然而无论从飞控运行稳定性、CPU占用、装机难度、滤波设置难度上看,32K都是弊端远远大于8K的。
其实无论是开8K还是32K,用低灵敏度还是高灵敏度陀螺仪上,很多人一直都是有很大的分歧的。可能很多人还是觉得32K就是感觉更好更快更顺滑,也是一种趋势,我觉得这其中并不排除主观的一些因素,比如错觉。我个人以前也做过很多实验,我感觉这类高灵敏度陀螺仪即使是只开了8K,减震做到了我认为的极致,滤波开的非常紧,也会在飞行中偶尔产生突然抖动一下的现象,这绝对不能满足花式飞行要求顺滑性极高的条件。而且我同样也丝毫没有感觉到高灵敏度陀螺仪和高于8K的任何飞行性能优势。所以我一直只用MPU6000的低灵敏度陀螺仪,只开双8K。当然竞速玩家可能另当别论。
六、OSD的改变:
OSD里直接可以显示打杆位置,这个对于录教学后期制作太有用了,不需要再录遥控器视角的画面了,正好等我闲了再出几期手法演示视频。反乌龟模式时可以直接在OSD里显示正确的打杆方向,这个感觉非常的有用,大大减小了反乌龟是打了错误方向导致桨的损伤,增加了反乌龟的成功几率。如果是比赛时候,更是节省了时间。
OSD显示设置可以单独调三种配置了,跟PID类似,这个感觉很实用,比如我们教学时候可以切换到有打杆显示的OSD界面,比如我们如果加了GPS会增加很多显示,如果不用了可以切回另一套显示配置,直接在OSD调参选项里就可以切换。
可以显示DSHOT电调回传相关数据的显示。
七、一些小设置:


电机怠速默认值被设置为5.5(以前是4.5),高一点会在AIRMODE时,飞机大动作后更稳定。
I值旋转默认被关闭了(以前为开启),I值旋转主要是在复合方向翻滚的时候,I值会旋转矢量方向,可以更好的控制住飞机,我也是经常做这种不定向的翻滚,旧版本也习惯了I值旋转,所以我依然打开它。I值旋转也可以用绝对控制所代替。
I值释放默认被打开(以前为关闭)。I值释放主要是可以让I在平稳飞行时积攒I,在大动作时释放I,减小大动作的回弹,但是我的D已优化的很好了,而且I值释放的弊端是在复合多方向的快速翻滚时反而会产生过冲,这个也亲自实践过,我也经常连贯的做很多翻滚,所以我还是选择关闭。
RC滤波器默认被打开(以前是关闭的,即插值方式)。RC滤波器表面上感觉很不错,可以滤除打杆时的细微手抖产生的不必要命令给飞控,但是我发现使用了RC滤波器后,打杆会变得迟钝,有点偏软,所以RC滤波器更适合平稳飞行的穿越机,不适合我自己这种经常做大动作的穿越机,所以我依然选择关闭。
不太重要的更新调整:
1、刷新固件的按钮被直接放置在调参软件的右上角。
2、不能解锁原因直接用文字形式表述了,没必要再查代码了。
3、OSD电压显示精度提高到小数点后两位,响应更快。
4、ROLL和PITCH可以分开单独调曲线了。
5、 可以直接更改油门行程限制值了。
6、增加弹射起飞功能,竞速用,花式不考虑。
7、BB响报警情景功能有了改变。
8、可以自定义自己专属配置的BF固件。
9、BF左上角可以显示完整的飞控型号了,以前是缩写。
10、双陀螺仪的飞控可以直接选择陀螺仪了,以前需要CLI命令更改。
11、BF模式开关可以链接其他模式同时启用。
12、由于F3内存空间的不足,更多的F3飞控的最新固件内容被删减,看来想要体验以后更多BF的新功能,放弃F3也是必须的了。
说在最后:
4.0.0的升级从表上也可以看出来又是继3.4.0大更新后的一次突破性更新,主要是又重新定义了滤波器和PID的动态算法。很多人可能最讨厌的就是BF更新的太快太复杂,包括我自己也是比较烦。每次大更新后很多算法完全改变了,很多人明明已经习惯了老版本的BF参数和手感,强迫症更新后又是完全不适应了。其实个人觉得BF开发的很多新功能主要还是针对竞速玩家更好的操控,初始参数就能让初学者更快的入手BF,更方便的调参,更容易的优化飞机等,但这确实是苦了已经习惯老版本的老玩家们,不过有些不影响手感的新功能还是非常赞的。其实这也是我每次大更新后要总结下新功能的目的,我必须要完全搞懂新功能的意义所在,套用其中的公式,才能保持我自己旧手感的同时,也能升级固件后体验新版本的其他乐趣。不过我所指的只是手感变化的更新内容,其他的比如更好的滤波系统,我还是真的佩服BF开发的执着,能让我们的飞机越来越稳定。当然这只是我个人的感受,也可能有很多人觉得新固件的新手感更适合一些。也可能有很多人就彻底放弃了BF,去投奔RF等其他固件了,但是我还是想说,玩穿越机我还是觉得越复杂越有意思,不然都研究完了,没有折腾的了,飞腻了,迟早颓废。
以上关系到手感变化的功能设置建议,完全是针对我自己手感和飞行风格(纯花式,经常快速复合多方向的翻滚,偶尔平稳飞行)而优化设置的,如果你和我的飞行风格类似,可以参照我的设置。可能有些人用了我的设置,反而觉得不好飞,那你可以看看官方给出的适合大部分人的建议,如果是纯竞速玩家,那就更可以忽略我的建议设置了。而且不同的飞机,不同的曲线,不同的PIDF,不同的装机工艺,都将会影响到你的设置,比如滤波。所以说设置只能是建议,能真正把自己的飞机调教的跟自己的宠物一样,操控的人机合一,还是要靠大家的真正对这些设置的理解和悟性。
,




