
本文内容来源于《测绘通报》2021年第12期,审图号:GS(2021)8192号
复杂环境下智能手机RTK PDR融合定位
徐国梁1, 李圳1, 陶钧2, 郭靖1, 赵齐乐1
1. 武汉大学卫星导航定位技术研究中心, 湖北 武汉 430079;
2. 武汉大学测绘学院, 湖北 武汉 430079
基金项目:国家自然科学基金(41974035);第四届中国科协青年人才托举工程(2018QNRC001)
关键词:高精度定位, PDR, RTK, 智能手机, 融合定位


引文格式:徐国梁, 李圳, 陶钧, 郭靖, 赵齐乐. 复杂环境下智能手机RTK PDR融合定位[J]. 测绘通报, 2021(12): 44-49,98.doi: 10.13474/j.cnki.11-2246.2021.370.
摘要
摘要:针对室外复杂环境下智能手机定位精度低、抗干扰能力不足的问题,本文利用手机GNSS观测值和手机内置IMU数据,采用RTK和PDR算法融合定位,对比分析了小米8和华为Mate20X两款手机的GNSS数据质量和融合定位算法性能,以及不同观测条件下融合算法的定位精度和稳定性。试验结果表明,在良好和复杂两种观测条件下,采用RTK算法定位精度分别为1.8 m和4.6 m;采用RTK PDR融合算法定位精度分别为1.2 m和2.6 m,在两种环境下,RTK PDR融合算法的精度分别提高了50%和76%,即显著提高了智能手机在室外复杂环境下的定位精度。
正文
近年来,随着移动互联网的迅速普及,智能手机等移动终端逐渐成为人们生活中必不可少的工具,基于移动终端的位置服务为人们的日常生活提供了极大的便利。目前,智能手机在室外环境中主要依靠全球导航卫星系统(global navigation satellite system,GNSS)进行定位。在良好的观测环境下,其平面精度能达3 m左右[1]。但在较差的观测环境下,如城市峡谷和隧道等,手机GNSS信号信噪比低、受多路径影响严重,导致定位精度迅速下降,甚至无法完成定位,给人们的生活带来了很多不便。提高弱GNSS信号环境下的定位精度成为亟须解决的问题。
2016年,谷歌(Google)公司在Android操作系统开放访问GNSS原始观测数据的接口。2018年,小米公司推出全球首款支持双频GNSS的手机小米8。如今,支持双频GNSS的智能手机越来越多,为手机高精度定位提供了可能。文献[2]利用华为P9手机原始GNSS观测数据分别进行静态精密单点定位(precise point positioning,PPP)和相对定位,精度可达分米级,并分析了限制精度提高的原因。文献[3]利用华为Mate20手机采集的BDS和GPS观测数据, 采用RTK(real time kinematic)方式,定位精度达分米级。文献[4]利用手机GNSS观测值,使用网络实时RTK差分数据实现高精度定位。文献[5]利用小米8和华为P10手机观测数据进行实时静态PPP定位,定位精度可达到亚分米级。
上述利用智能手机GNSS观测值进行高精度定位的试验是基于良好的观测环境,但在复杂环境下,其定位效果不佳,甚至难以解算出连续的有效解[6]。为此,本文利用手机采集的GNSS和IMU(inertial measurement unit)数据进行融合定位,以提高定位导航的准确性和连续性。GNSS RTK算法的绝对定位精度较高,但在某些遮挡环境下精度显著下降;而结合IMU数据利用PDR(pedestrian dead reckoning)算法在进行行人位置估计时,短时间内相对定位精度较高。因此,利用RTK PDR融合算法进行定位,可充分发挥RTK和PDR算法定位特点的互补性,有助于实现室外全场景高精度定位。
1 算法原理1.1 RTK算法原理
RTK系统采用站间、星间双差模型。通过对基准站和流动站的载波相位差分,消除了观测值中公共误差项[7]。由于试验基线较短,故双差观测值中对流层和电离层误差忽略不计,其观测模型为

1.2 PDR算法原理
PDR算法利用IMU传感器采集的加速度、角速度及磁场强度,通过模型计算出行人步行时的步长、步频及航向,实现相对定位。此算法包括步态检测和航向估计[8]。
1.2.1 步态探测
步态检测包括步长估计和步频检测。采用波峰波谷阈值检测法对步频进行检测,当周期内信号波峰大于波峰阈值、波谷小于波谷阈值,并且相邻波峰时间间隔大于时间阈值时为有效探测。步态探测流程如图 1所示。

图 1PDR步态探测算法流程
步长估计采用非线性步长估计模型,本文选择Weinberg模型[9],公式为

式中,Sk为第k步的步长;K为拟合系数;amax和amin分别为步长周期内加速度最大、最小值。
1.2.2 航向估计
传统PDR算法一般采用陀螺仪或电子罗盘确定航向。本文采用Mahony互补滤波估计航向,利用陀螺仪和电子罗盘的互补优势,具有较好的估计效果[10-12]。航向估计流程如图 2所示。

图 2航向估计算法流程
1.3 RTK PDR融合算法原理
RTK PDR融合算法原理如图 3所示。

图 3RTK PDR融合算法流程
首先,对RTK系统解算的定位结果进行误差检测,根据行人行走特点,一般行人步行速度不会大于10 m/s。因此,运用RTK定位结果计算当前时刻行人速度(式(3)),Pk, GNSS和Pk-1分别为k时刻GNSS定位和k-1时刻经过滤波后的定位结果,若v超过所设阈值,则认为该历元RTK定位误差过大,需对RTK定位进行降权处理[13]。若通过检测,则认为RTK定位坐标较精确。然后,将检测后的RTK定位结果和PDR定位结果作为卡尔曼滤波的输入量,将PDR和RTK定位结果之差作为卡尔曼滤波的状态量。最后,用滤波后的值反馈校正PDR系统,输出最终的RTK-PDR融合定位结果。

融合算法采用卡尔曼滤波,其状态向量为

式中,δNk、δEk、δSk、δφk分别为北向、东向位置误差,步长估计误差及航向估计误差[14-16]。假设步长和航向符合一阶马尔可夫过程,根据PDR原理,系统状态方程式为

式中,

;xk-1为上一时刻的状态;F和ωk分别为系统噪声矩阵和系统过程噪声;φ为当前时刻航向角;ΔT为采样间隔;TS、Tφ为相关时间。系统观测量为PDR和RTK位置差,即

式中,观测向量zk=[znze]T,zn和ze分别为PDR与RTK北向和东向位置之差。系统观测方程式为

式中,

;vk为观测噪声。
2 试验数据处理与分析2.1 数据采集
利用小米8、华为Mate20X手机进行测试,将天宝NetR9接收机(TMR9)作为基准站。手机GNSS原始观测数据采用开源软件Geo RINEX Logger进行采集,采样频率为1 Hz。IMU数据采用自己编写的Sensor Data Logger软件进行采集,采样频率为50 Hz。两台手机静态观测约6 h,动态试验约1 h。图 4为试验路线和试验装置,图 4(a)中左侧为操场环境,右侧为校园林荫环境,操场环境相对开阔,林荫环境树林遮挡严重;图 4(b)左侧为参考站,右侧为试验场景,动态试验条件为手持两台手机正常匀速行走。

图 4试验路线与装置
2.2 PDR试验分析
由于加速度数据含有高频噪声,严重影响步态检测精度,因此对数据进行预处理。行人行走的步频一般为0~3 Hz。为此,采用巴特沃斯滤波器[17],设定带通截止频率为3 Hz,带阻截止频率为5 Hz,为了保证滤波器的良好性能,设定其通带最大波纹为0.5 dB,阻带最小衰减为40 dB。加速度变化如图 5所示。

图 5滤波前后的加速度变化
由图 5可以看出,滤波之后的加速度时间序列更加平滑,有效地消除了高频噪声。利用波峰波谷步态检测算法检测步态,图 5(b)的标记点表示检测通过。
本文对比分析了两种航向估计算法的效果。试验条件为在室外东西南北4个方向各静止5 s,利用采集的IMU数据进行航向估计。
图 6为利用两种算法进行航向估计的结果。可以看出,互补滤波估计结果明显优于电子罗盘估计结果,互补滤波解算结果与参考值基本吻合,而电子罗盘的解算结果由于环境干扰当航向角在90°和270°附近时存在10°左右的偏差,严重影响定位精度。Mahony互补滤波解算航向角平滑且准确,能够满足PDR定位精度要求。因此,本文采用互补滤波算法进行航向估计。

图 6航向估计对比
2.3 GNSS静态数据分析
2.3.1 伪距噪声分析
利用手机观测值和TMR9接收机观测值构成短基线站间单差,通过在同一历元不同卫星间求均值消除接收机钟差和接收机端硬件延迟,仅剩伪距多路径和观测值误差。
图 7为两台手机在GPS系统L1频点的伪距噪声随时间变化情况。两台手机的伪距噪声均呈现0均值白噪声。经过统计,小米8的伪距精度约为3.92 m,华为Mate20X的伪距精度约为4.21 m;两台手机的伪距精度相当,小米8略优于Mate20X。

图 7两台手机伪距噪声对比
2.3.2 相位噪声分析
与伪距分析相似,本文相位观测值质量分析同样采用与几何无关的方法。短基线两个测站通过站间和历元间双差,通过扣除所有卫星的均值进一步消除接收机钟差、接收机端硬件延迟速率之差及多路径和观测值噪声的常数项。
图 8为小米8和华为Mate20X经过站间和历元间双差后扣除均值得到的GPS系统L1频点载波相位残差。两台手机的相位噪声变化速率较稳定,无明显跳动。经过统计,小米8的相位噪声约为0.58 cm,华为Mate20X的相位噪声约为0.60 cm;两台手机相位噪声相当,小米8略优于华为Mate20X。因此,基于大众智能手机GNSS观测值进行高精度定位具有可行性。

图 8两台手机相位噪声对比
2.4 GNSS PDR动态融合算法分析
在动态试验中,对比分析了两台手机在操场和校园林荫环境下采用单频RTK、PDR和RTK-PDR融合算法的定位性能,采用事先标定的参考点进行定位精度评估,手机PDR定位运用RTK初始化。参考点位置标定采用TMR9接收机进行静态观测,观测时间为5 min,运用RTK算法进行位置解算,其平面精度为1 cm。
2.4.1 开阔环境
本段试验全长约400 m,路线中设有10个参考点。
图 9为两台手机在操场环境的定位结果。蓝色轨迹表示PDR定位结果,两台手机前200 m定位较准确,后200 m由于航向角估计不准确导致发散,两台手机PDR定位的RMS分别为9.86、8.56 m。红色轨迹表示RTK定位结果,定位结果较准确,但在参考点4~6区间内,由于树林遮挡影响,两台手机均出现载波相位观测值不连续且可见卫星减少,对RTK定位产生较大的影响。图 10为在各个参考点的误差统计,两台手机在参考点3和4误差均超过3 m,RTK定位的RMS分别为1.92、1.67 m。黄色轨迹表示RTK PDR融合算法定位结果,两台手机定位轨迹比较平滑,参考点误差均维持在2 m以内,RMS分别为1.24、1.06 m。
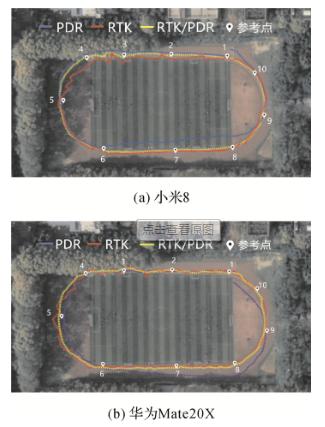
图 9两台手机在开阔环境下的定位

图 10两台手机误差统计
2.4.2 林荫遮挡环境
本段试验全长约450 m,路线中设有10个参考点。
图 11为两台手机在林荫遮挡环境下的定位结果。两台手机PDR在前半程定位较准确,后半程开始发散,RMS分别为12.39、11.66 m。如图 11所示,手机在S1和S2两段GNSS信号几乎完全被遮挡,两台手机由于缺少相位观测值均无法完成RTK定位,此时会采用PDR定位结果。当GNSS观测环境改善后,RTK定位对PDR进行校正反馈。如图 12所示,在3~6参考点区间内,观测条件较差,小米8和华为Mate20X手机RTK定位误差分别维持在7、8 m内;在7~10参考点区间内,观测环境较好,两台手机RTK定位误差分别维持在3、5 m内。在复杂环境下,RTK-PDR融合算法结合了PDR定位平滑和RTK定位无累积误差的优点,具有较高的定位精度,两台手机定位精度RMS分别为2.37、3.49 m,不同环境RMS对比见表 1。

图 11两台手机在林荫遮挡环境下的定位

图 12两台手机误差统计结果
表 1 两台手机在不同环境RMS对比

3 结语
本文针对智能手机提出了一种RTK PDR融合算法,利用手机的GNSS原始观测值和手机内置IMU数据,有效地解决了在弱GNSS信号环境下手机RTK定位精度低、不连续的问题。
对比分析了小米8和华为Mate20X两台手机在静态情况下GNSS观测值的伪距和相位噪声,两台手机伪距噪声均优于5 m,相位噪声均优于0.6 cm,智能手机实现高精度定位具有可行性。PDR航向估计采用互补滤波算法,提高了传统航向估计算法的精度和抗干扰能力。融合算法采用卡尔曼滤波,结合了RTK和PDR定位的优点。
试验结果表明,手机RTK在良好观测环境下可实现分米级定位,并对PDR进行校正反馈,有效抑制PDR由于累积误差造成的漂移。PDR在观测环境差的情况下提供连续的定位结果,弥补了GNSS抗干扰能力弱的缺点。融合算法在两种不同的观测环境下均能达到比较良好的定位效果。观测环境良好时,两台手机融合算法定位精度分别为1.24 m和1.16 m;观测环境较差时,定位精度分别为2.37 m和3.49 m,基本能够满足大众行人日常导航定位需求。
作者简介
作者简介:徐国梁(1997-),男,硕士生,主要研究方向为室内外无缝定位、多源传感器融合定位。E-mail:xuguoliang@whu.edu.cn
通信作者:郭靖。E-mail:13429313661@163.com
初审:纪银晓
复审:宋启凡
终审:金 君
往期推荐
资讯
○ 北京大学遥感所人才招聘
○ 2022年度基金委九大学部申请注意事项
○ 研究生如何提炼学位论文创新点
○ L波段差分干涉SAR卫星发射成功,填补多项国内空白
会议
○ 国家自然科学基金重大项目“地表异常遥感探测与即时诊断方法”项目启动暨专家委员会成立会议成功举办
○ 筑一流平台 邀天下英才 | 测绘遥感信息工程国家重点实验室诚邀海内外青年才俊参加武汉大学第九届国际交叉学科论坛
○ 武汉大学资环学院诚邀海内外青年才俊参加国际交叉学科论坛
○ 自然资源部深地科学与探测技术实验室2021年度学术年会
《测绘学报》
○ 测绘学报 | 魏智威:建筑物图形形状相似性计算的序列分析法
○ 测绘学报 | 王勇:复杂建筑物最短邻近线多边形聚合法
○ 测绘学报 | 谭永滨:顾及距离约束的地标相对影响力评价模型
○ 测绘学报 | 朱长青:区块链与数字水印相结合的地理数据交易存证及版权保护模型
《测绘通报》
○ 地市级实景三维城市建设及应用
○ 面向上海城市数字化转型的新型测绘
○ 基于Sentinel-2影像的雄安新区土地利用分析
○《测绘通报》2021年第12期目录
《北京测绘》
○《北京测绘》2021年第10期摘要推荐
○《北京测绘》2021年第9期摘要推荐
○《北京测绘》2021年第8期摘要推荐(下)
○《北京测绘》2021年第8期摘要推荐(上)
《测绘科学技术学报》
○ 摘要 |《测绘科学技术学报》2021年第2期摘要推荐
○ 摘要 |《测绘科学技术学报》2021年第4期摘要推荐
○ 摘要 |《测绘科学技术学报》2021年第5期摘要推荐
○ 摘要 |《测绘科学技术学报》2021年第6期摘要推荐
《地球信息科学学报》
○ 《地球信息科学学报》2021年第12期佳文推介
○ 龚健雅院士:全球位置信息叠加协议与位置服务网技术研究进展与展望
○ 佳文推介 | 大数据城市通勤交通模型的构建与模拟应用
○ 专刊征稿:社会感知与地理大数据挖掘(征稿中)
《测绘工程》
○ 摘要 |《测绘工程》2021年第5期摘要推荐
○ 摘要 |《测绘工程》2021年第4期摘要推荐
○ 摘要 |《测绘工程》2021年第6期摘要推荐
○ 测绘教学 | 后疫情时代“线上 线下”混合教学模式创新——以测绘类课程视角
《中国空间科学技术》
○《中国空间科学技术》2021年第6期摘要
○《中国空间科学技术》2021年第5期摘要推荐
○ 摘要 |《中国空间科学技术》2021年第3期摘要推荐
○ 火卫二地形地貌探测综述
《卫星应用》
○《卫星应用》2021年第12期摘要○《卫星应用》2021年第11期摘要○《卫星应用》2021年第10期摘要○ 摘要 |《卫星应用》2021年第9期摘要推荐《Journal of Geodesy and Geoinformation Science》
○《测绘学报(英文版)》专刊征稿 | 地图学与地球空间信息教育:理论与实践
○ 《测绘学报(英文版)》(JGGS)2021年第4期发布
○ 《测绘学报(英文版)》专刊征稿 | 用于三维地理信息的摄影测量和计算机视觉
○ 综述 | Geodesy Discipline: Progress and Perspective
《Satellite Navigation》
○ 熊超教授:地磁暴期间夜间低纬电离层和赤道等离子体不规则体| SANA佳文速递
○ 徐元博士:面向有色测量噪声下UWB/INS组合行人导航的分布式卡尔曼滤波| SANA佳文速递
○ 杨飞博士:GNSS天顶对流层精化模型的构建与分析| SANA佳文速递
○ 姚铮教授:北斗PPP服务信号调制复用方案设计与质量评估| SANA佳文速递
《自然资源遥感》
○ 《自然资源遥感》入驻“智绘科服”融媒体平台!
○ 《自然资源遥感》征稿:“海岸带空间资源及生态健康遥感监测”专栏
○ 摘要 |《自然资源遥感》2021年第3期摘要推荐
○ 摘要 |《自然资源遥感》2021年第4期摘要推荐
《Journal of Geovisualization and Spatial Analysis》
○《Journal of Geovisualization and Spatial Analysis》入驻“智绘科服”融媒体平台!
○ JGSA国际期刊2021年第5卷第2期论文摘要
○ 高被引论文推荐 | Journal of Geovisualization and Spatial Analysis
,




