1.背景介绍
基于纳米材料的高性能、多功能、可穿戴新型器件是后摩尔时代微电子领域的重要发展方向之一。诸多理论及实验研究表明,对单个纳米材料进行弯曲、折叠、扭转,或对多个纳米材料进行连接、装配、排列等,可获得具有特殊性能的纳米结构,为实现高性能及柔性纳米器件研制提供了新的方向。纳米操作技术作为一种“自下而上”操纵纳米材料的重要手段,由于具有微纳米级别的操作精度,被应用于纳米材料性能测试、纳米结构制造与装配、纳米光学等领域。同时该技术与电子束诱导沉积、激光焊接、电子束辐照等相结合,可以实现纳米材料的掺杂、焊接、装配等。因此,纳米操作技术及其装备也成为了新型纳米器件研发的关键。
2.关键技术进展
纳米操作技术种类繁多,一种是依托具有纳米级成像精度的显微镜的操作技术。例如,扫描探针显微镜(Scanning Probe Microscope,SPM)、电子显微镜(Electron Microscope,EM)。该类方法借助显微镜的成像系统,通过控制高精度运动模块,利用探针、镊子等工具对纳米材料进行操作。另外,通过控制光场、磁场、声场等,使位于能场作用范围的纳米材料移动、旋转等,如光镊、磁镊、声镊等。目前,基于SPM、EM的操作技术和光镊技术在纳米材料操作及器件制造方面占据重要地位。
2.1 基于SPM的纳米操作技术
由于SPM具有高精度运动模块和反馈系统,因此通过控制探针的运动不仅可以获得纳米材料三维位置信息,也可以推移尺寸小至十几纳米的颗粒,实现高精度操作。然而,在典型的SPM操作中单个探针难以同时进行成像及操作工作,因此在操作过程中缺乏实时成像信息导致的低成功率是该方法面临的主要问题。目前主要解决方法包括,优化成像及操作策略以预测或获得被操作对象运动轨迹、增加视觉反馈系统、建立双探针操作/成像系统等,如图1(a)、(b);同时通过改进操作策略也有利于进一步提高操作成功率及操作效率,如图1(c)所示的虚拟纳米手策略。另外由于探针的运动自由度少、灵活度低等不足,该技术难以实现三维复杂操作。为拓宽该技术在纳米器件制造中的应用,如图1(d)~(f):Xie等提出了利用双探针夹持、拾取、放置纳米线;Park等利用圆形槽基底,进行了Au纳米球的三维堆叠;Chen等则利用扫描隧道显微镜对石墨烯沿着指定方向进行折叠和展开操作,实现了基于SPM的简单三维操作。

图1 基于SPM的纳米操作及应用。(a)同步视觉引导的操略;(b)双探针操作/成像系统;(c)虚拟纳米手操作策略;(d)双探针搬迁纳米线;(e)Au纳米球三维堆叠;(f)石墨烯折叠;(g)等离子激元结构装配;(h) 量子点与纳米颗粒装配;(i)纳米线电路制造
基于SPM的纳米操作技术以其较高的操作精度和高精度反馈系统,可主要用于纳米材料的性能测试及调控,包括材料力学测试、电学性能测试、材料形变等。并且通过操作量子点、纳米颗粒、纳米立方体等,进一步构建具有特殊性能的纳米结构,如图1(e)、(h)。另外,通过结合SPM操作技术与纳米焊接技术,可以实现纳米器件电路结构的制造,如图1(i)。
2.2 基于EM的纳米操作技术
为获得操作过程中的实时视觉信息,以EM作为视觉系统,通过在EM内部建立纳米操作平台,如图2(a)、(b),极大地提高操作灵活度和成功率。该技术灵活度高、操作空间大,具有实时视觉反馈,有利于实现纳米材料的三维复杂操作及纳米结构的装配,包括纳米线的弯曲、纳米颗粒的堆叠、纳米针尖的装配等,如图2(c)~(e)。然而基于EM的纳米操作面临着两个重大挑战。一方面,操作系统对EM的换样效率、成像精度带来负面影响;同时真空环境、电子束辐照对材料的损伤也限制了其应用。因此国内外诸多研究者先后研发了多种纳米操作平台,提高了操作平台与EM的兼容性。另一方面,EM成像仅能获得高精度的二维位置信息,因此难以控制探针与被操作对象在深度方向的相对位置,降低了操作成功率。为解决深度信息获取问题,研究者们提出了测量焦距差值法、采用震动式压电探针、建立激光反馈系统、增加压电传感器,如图2(f)所示。

图2 基于ERM的纳米操作及应用。(a)多探针纳米操作机器人;(b)单探针纳米操作平台;(c)碳纳米管弯曲;(d)纳米颗粒的堆叠;(e)纳米针尖的组装;(f)纳米操作平台中的压电传感器;(g)纳米线与电极的互连;(h)场效应晶体管的制备
由于基于EM的纳米操作技术主要优势是易于实现较为复杂的三维操作,因此该方法适于纳米材料的拉伸、弯曲、力学及电学性能测试等。并且通过与其他制造加工技术结合,可对单个纳米材料进行制造加工。例如,借助电子束诱导沉积技术实现纳米线互之间连以及纳米线与电极之间互连,实现了纳米结构以及场效应晶体管的制造等,如图2(g)、(h)所示。
2.3 光镊技术
光镊技术是一种非接触式的操作方法,避免了操作工具被操作对象直接接触,减少了对被操作对象的损伤。按照使用的光源不同,光镊可分为远场光镊和近场光镊。远场光镊主要是利用光束整形技术形成不同类型的光学势阱,进而捕获纳米材料,同时实现纳米线的旋转,如图3(a)、(b)。近场光镊能够突破衍射极限,更适合高精度纳米材料。目前,对于近场光镊的研究主要集中于探索不同的近场增强方法,以提高对材料的捕获力。如图3(c)~(f)所示,采用同轴光阑结构、一维光子晶体谐振器结构、二维等离子基元光学晶格结构、双纳米孔结构等不仅可以增大捕获力,同时也可以提高捕获刚度。基于近场光镊,也可以实现纳米材料的加工,如哈尔滨工业大学王扬课题组利用激光辐照AFM探针针尖产生近场光,实现了纳米颗粒的操作以及纳米线的互连。为进一步拓宽光镊技术的应用范围,在稳定捕获被操作对象后,还需要进一步实现被操作对象的高精度、大范围运动,因此利用光纤探针的操作方法被提出。通过在光纤探针末端加工反射斜面、锥形结构、中空结构、蝴蝶结状孔结构等可以形成稳定的三维光学势阱,使探针末端可以捕获纳米材料,如图3(g)~(i)所示。
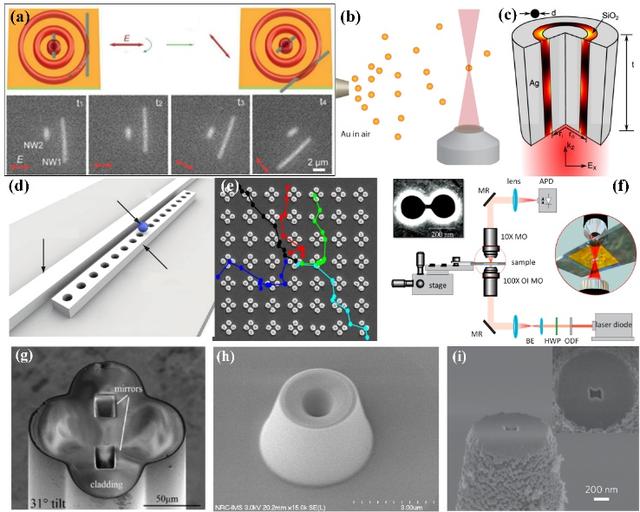
图3 光镊技术及应用。(a)纳米线旋转;(b)空气中捕获纳米颗粒;(c)同轴光阑结构;(d)一维光子晶体谐振器结构;(e)二维等离子基元光学晶格结构;(f)双纳米孔结构;(g)光纤探针末端反射斜面;(h)中空式光纤探针;(i)光纤探针末端蝴蝶结状孔结构
3.总结与展望
基于SPM的操作技术借助高精度的力反馈系统,可以对尺寸小至几十纳米的材料进行高精度操作。然而,由于缺乏高精度的实时视觉反馈使操作效率降低。同时该方法也仅能实现较小范围的、简单的三维操作,难以进行大尺寸复杂纳米结构的构建。基于EM的操作技术最大优势是可对操作过程进行实时视觉监测,并利用多个操作工具灵活、协调地工作,轻松实现了复杂三维纳米操作。但由于EM的真空环境、电子束辐照等,使其难以对无法承受高真空及电子束辐照的材料进行操作。另外,相比于SPM,该方法无法获得材料及探针高精度的三维位置信息,操作精度较低。光镊技术作为一种非接触的操作方法,减小了操作过中对纳米材料的破坏。同时通过控制光的作用范围、强度等可以有效地操作几纳米的颗粒。但由于光对纳米材料的力的作用较小,且操作环境多为溶液,因此其应用范围受到了极大限制。在纳米器件方面,基于SPM、EM的操作逐渐被应用于纳米结构制造及器件研发,包括纳米材料性能测试及调控、多个纳米材料的装配、纳米结构的制造等,有利于实现高性能器件的研发。光镊技术目前主要被用于纳米材料的捕获及有限移动,并逐渐向大范围、高精度的三维操作方面发展,因此光镊技术也逐渐被用于纳米制造及器件研发。三种纳米操作技术在适用对象、应用范围、操作效果等方面各有优势,但同时也存在各自亟待解决关键技术问题及科学问题。因此,发展集成式的操作方法及系统,实现多种操作方法优势互补,也是未来纳米操作技术发展的重要方向。
全文链接:王根旺, 管延超, 王扬, 丁烨, 杨立军. 纳米操作技术研究及应用进展[J]. 中国激光, 2021, 48(8): 0802018
,




