01
相机成像原理
要理解空中三角测量,就要先知道相机成像原理,下面这张图让你一看就懂:
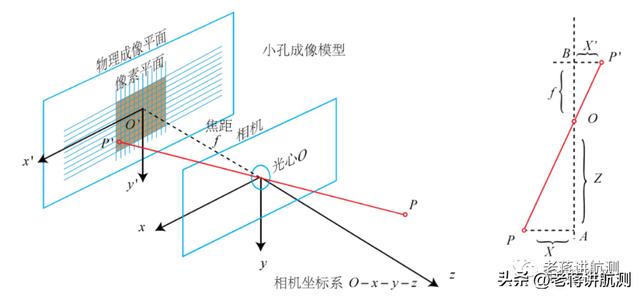
其中,P为物方点,O为成像中心,P’为成像点。
共线条件方程:物方点、相机成像中心、像方点三点共线
02
空中三角测量
定义:
空三是空中三角测量的简称。相机输出成像时的位置和姿态都是有误差的,空三是以重投影残差最小化为目标重新求解相机成像时的位置和姿态。
空三的作用:
•空三是建模的基础,是摄影测量核心算法之一
•好的空三成果是建好二三维模型的基础
03
空中三角测量步骤
第一步:找出每张像片有特征的点——特征点提取
•像片中颜色或纹理变化剧烈的点称之为特征点
•一般用像素值本身及其周围像素关系来描述特征点

第二步:将不同像片中相同的特征点关联起来——特征点匹配
•将不同照片特征信息一致的特征点关联
•需保证同一特征点能被不同像片拍到(有重叠度)
•提取算法需能在不同亮度、不同尺度、不同角度等情况下,都能关联特征点
•匹配的特征点数量会低于第一步提取的特征点数量

第三步:根据匹配结果调整相机位置姿态——区域网平差
•根据初始带误差的相机位置和姿态,匹配的特征点空间中不能相交
•平差就是通过调整相机内参、成像时位置和姿态,让特征点在三维空间中相交的误差最小
•调整时会以初始位置和姿态做参考,在设定的范围内做调整(大疆智图中的初始POS精度)
•特征点被越多的照片观测到,参考信息越多,平差可靠性就会越强

04
空三输出成果——相机内参
描述相机成像内部的参数相机内参,一般有9个参数:
1. 焦距(2个):fx,fy (以像素为单位,一般fx≈fy)
2. 像主点偏移量(2个):cx、cy (以像素为单位)
3. 畸变参数(一般为5个):k1、k2、p1、p2、k3
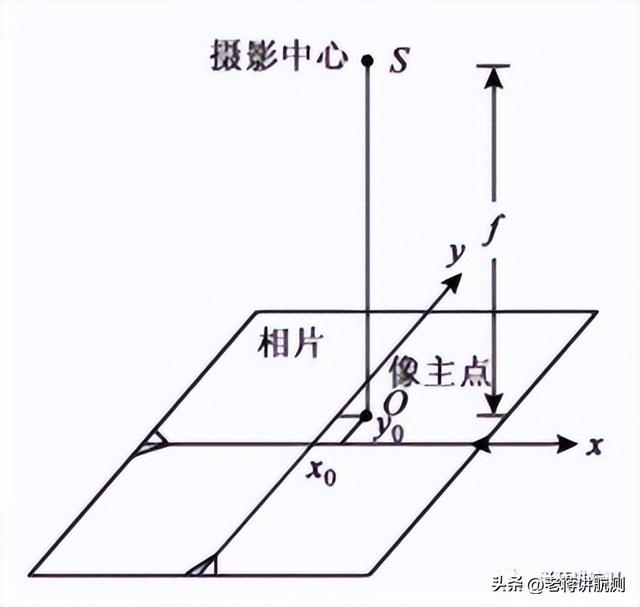
描述拍照时刻相机的位置和姿态的参数称之为相机外参,共6个参数,每张照片的外参数都不一样:
1. 相机成像时刻位置(X、Y、Z)
2. 相机成像时刻姿态(Omega、Phi、Kappa)
,