【项目引入】
电动机是拖动控制系统的主要控制对象,在工业控制中,被控对象有很多运行方式,点动、连续控制等。本学习情境中,以广泛使用的三相鼠笼型异步电动机为对象,主要介绍PLC如何实现电动机启停控制,学会如何利用PLC来实现电动机的点动与连续的复合控制 。
【学习目标】
(1)掌握电动机的点动和连续控制电路。
(2)掌握PLC在对象控制时,I/O点的确定,能实际正确接线。
(3)熟悉PLC软元件的应用,并掌握PLC的扫描工作过程。

几点说明:
(1)自锁触头:放开按钮SB2,接触器线圈失电,在启动按钮SB2两端并联接触器KM的辅助动合触头,以保证启动后,放开按钮SB2,接触器线圈仍处于通电状态。这种自身触头的动闭保证自身线圈不失电的控制称为自锁控制,该触头称为自锁触头。
(2)短路和过载保护:电路中安装熔断器和热继电器,具有短路和过载保护的功能。接触器自身具有欠压保护作用,接触器与按钮配合使用,当突然断电时,自锁触头断开,故再次来电时,电动机不会自行启动工作。该电路还具有欠压和失压保护的功能。

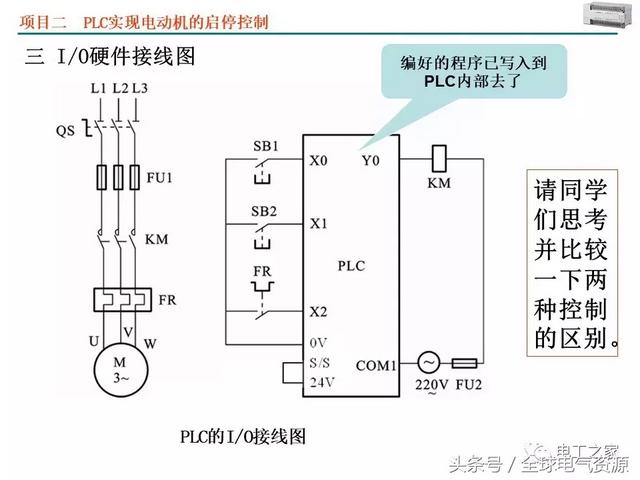
(1)在PLC的外接触点中,大部分按钮触点均使用动合触点,少数如(急停按钮和过载保护触点)使用动断触点,有关外接动断触点的使用,在后面单元中具体介绍。
(2)对于PLC的输出端子来说,允许的额定电压为220V,因此需要将原线路图中接触器的线圈电压由380V改为220V,以适应PLC的输出端子需要。


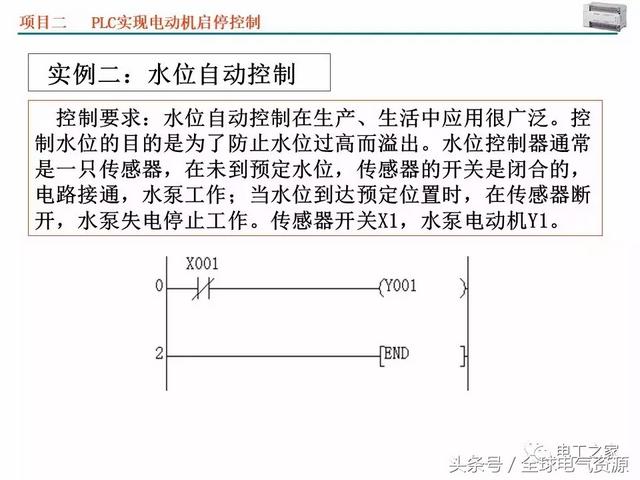
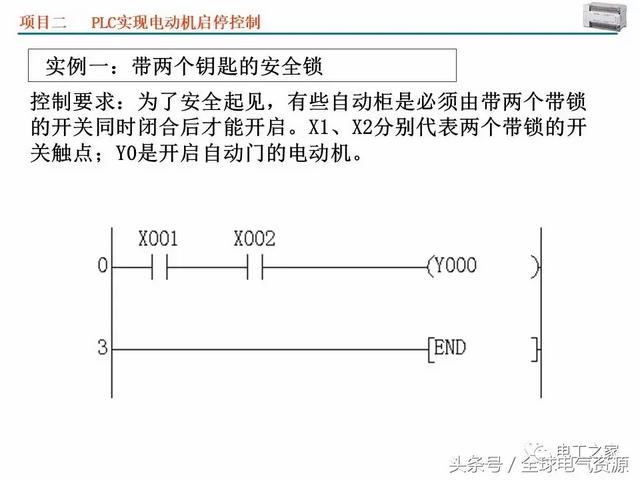
(1)梯形图是按从上到下的顺序绘制,两侧的竖线类似于继电器电路图的电源线,通常称作母线(有的时候只画左母线)。两母线之间是内部继电器动合、动断触点以及继电器线圈或功能指令组成的一条条平行的逻辑行(或称梯级),每个逻辑行必须以触点与左母线连接开始,以线圈或功能指令与右母线连接结束。
(2)继电器电路图中的左、右母线为电源线,中间各支路都加有电压,当支路接通时,有电流流过支路上的触点与线圈。而梯形图的左、右母线并未加电压,梯形图中的支路接通时,并没有真正的电流流动,只是为分析方便的一种假想的“电流”,且只能从左向右流动。
(3)梯形图中使用的各种器件(即软元件),如输入继电器、输出继电器、定时器、计数器等,是按照继电器电路图中相应的名称称呼的,并不是真实的电器器件(即硬件继电器)。梯形图中的每个触点和线圈均与PLC存储器中元件映像寄存器的一个存储单元相对应,若该存储单元为“1”,则表示动合触点闭合(即动断触点断开)和线圈通电;若为“0”,则表示动合触点断开(即动断触点闭合)和线圈断电。
(4)梯形图中输入继电器的状态唯一地取决于对应输入电路中输入信号的通断状态,与程序的执行无关。因此,在梯形图中输入继电器不能被程序驱动,即不能出现输入继电器的线圈。
(5)梯形图中辅助继电器相当于继电器电路图中的中间继电器,是用来保存运算的中间结果的,不对外驱动外部负载,外部负载只能由输出继电器来驱动。
(6)梯形图中各软元件的触点既可动合,又可动断,其动合、动断触点的数量是无限的(也不会损坏),梯形图程序设计时需要多少就使用多少,但PLC输入、输出继电器的硬触点是有限的,需要合理分配使用。
(7)继电器控制线路中,当电源接通时,线路中各继电器都处于受制状态,即该吸合的继电器都同时吸合,不应吸合的继电器都因受某种条件限制不能吸合;而在梯形图的控制线路中,图中各软继电器处于周期性循环扫描控制中,受同一条件制约的各个继电器的动作次序决定于程序中控制这些继电器的顺序。
(8)梯形图修改方便,适应性强。继电器控制电路一旦构成,其功能单一,修改困难。