(一)大疆精灵4RTK无人机组成
主要由飞机机身与相机及云台(图1)、遥控器及飞控软件(安
装在遥控器内)(图2)等三个部分组成。

图1 飞机机身与相机及云台

图2 遥控器及飞控软件
(二)无人机开机准备工作
1、带高亮屏的遥控器本身内置飞控软件【GS RTK】,无需自行下载。短按长按遥控器开机按钮即开启遥控器自行进入飞控软件初始界面(图3);
2、正确安装无人机电池、螺旋桨后短按长按电池按钮后,听到无人机提示音即成功开启无人机(图4);
3、从遥控器屏幕顶部下拉菜单栏进入WIFI热点连接界面,连接可用的无线网络即可(图5~6)。

图3 遥控开机按钮

图4 无人机开机按钮

图5 热点列表

图6 连接热点
(三)无人机指南针校准
点击遥控器屏幕的“飞行”按钮,进入软件的飞行界面后,点击屏幕右上角图标列表下的“高级设置”(图7),再选择“传感器”(图8)点击“指南针校准”(图9),按照提示步骤先水平离地约1.2米逆时针转动无人机(图10),再将无人机竖直逆时针旋转(图11),直到校准完成,如若多次校准失败,则换个场地再进行校准。

图7 选择高级设置

图8 选择传感器

图9 选择指南针校准

图10 水平逆时针旋转

图11 竖直逆时针旋转
(四)无人机飞控基本参数设置
1、无人机飞行一般需要RTK定位以获取高精度的位置信息,因此首先进行RTK账号的连接,点击屏幕右上角“...”,选择RTK按钮,打开“飞行器RTK定位”开关,如果已购买网络RTK套餐服务则在“接收RTK信号方式”右侧箭头列表选择“网络RTK”(图12);如果未购买网络RTK套餐服务则在“接收RTK信号方式”右侧箭头列表选择“自定义网络RTK”(图13),按照提示填写RTK账号的相关信息,填写完成后点击设置即可成功连接;

图12 网络RTK设置

图13 自定义网络RTK设置
2、点击屏幕右上角“...”,选择飞机按钮,设置返航高度,根据测区海拔高度,设置合理安全的最低返航高度,一般“最大飞行高度限制”设置为500,此高度也是大疆无人机的飞行最大高度,“最大飞行距离限制”可按照实际情况而定,“失控行为”选项可选择“悬停”、“降落”、“返航”,一般建议在飞机失控情况下选择返航(图14);
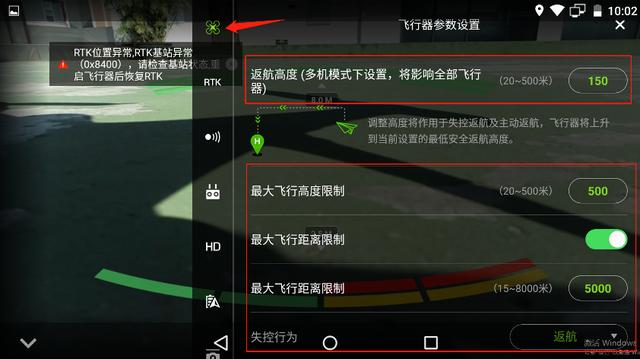
图14 设置返航高度、飞行高度与距离限制
3、点击屏幕右上角“...”,选择摇杆按钮,点击“摇杆模式”图(15),设置主机遥控模式,根据个人习惯,主要设置摇杆控制飞机上下前后左右方向以及飞机的左旋转和右旋转动作。摇杆模式主要有日本手、美国手、中国手和自定义四种模式(图16),在飞机起飞前一定要进行摇杆模式的确认。

图15 设置摇杆模式

图16 设置摇杆动作
4、点击屏幕右上角“...”,选择电池按钮,设置电池的低电量、严重低电量报警数值。

图17 电池电量报警数值设置
(五)无人机起飞与拍摄
1、遥控器摇杆“内八字”进行解锁无人机(图19),同时将档位调至“P”档(图19);

图18 内八字解锁

图19 F/A/P档
2、解锁无人机后,轻推上升油门摇杆即起飞,同时注意高度、距离的变化,点击屏幕(图20~21);

图20 观察高度与距离变化1

图21 观察高度与距离变化2
3、根据任务需要可选择照片或视频拍摄。

图22 拍照、视频切换
(六)飞机返航与降落
可以选择手动返航或者一键返航,使用一键返航功能(长按该键),如果飞机高度低于设置的返航高度,飞机将会爬升至该高度后再返航,如果飞机高度高于设置的返航高度,飞机将会按照当前高度返航(图23)。

图23 一键返航功能
(七)规划航线拍摄
- 规划航线拍摄是飞机自动执行预设航线任务,打开遥控器,选择“规划”(图24),按照需求选择合适的规划方式(图25)。
- 以“摄影测量2D”为例,选中该功能进入航线规划界面,框选测区范围(紫色点封闭区域),拖动黄点可以调整航线方向,根据任务需求调整飞行高度、速度以及拍摄模式;
- “相机设置”项按照默认,勾选“畸变修正”保存;
- “重叠率设置”需根据地形起伏高差选取合适的航向、旁向重叠度、边距,避免测区最高点重叠度不够。
以上参数设置完毕后点击保存,命名任务信息,选择“调用”--“执行”--“确定”--“向右滑动自动执行”,等待飞机自动执行任务(图26~34)。

图24 规划按钮界面

图25 规划方式

图26航线规划界面

图27 相机、重叠率设置
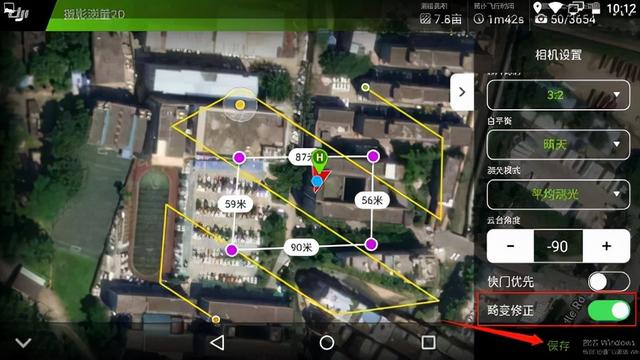
图28 相机畸变修正

图29 重叠率设置

图30输入任务信息

图31 任务调用

图32 任务执行

图33 注意事项确认

图34 作业自检、自动执行
航线规划飞行任务可以提前设置保存,需要飞行时打开该任务调用即可。测区范围也可以通过导入.KML格式的文件(.KML的属性只能是面类,不能是线类),导入范围线后按照以上步骤进行参数设置即可。
,




