
“我们压根没有提出这个概念。你想把它放到隐形眼镜里,大小、生物相容性方面还有很长的路要走。”
文 | 光谱
这几天,热爱科学的硅星人,时间线被一款“高科技隐形眼镜”刷屏了。



点进这些新闻看了一下,感觉好不厉害!隐形眼镜不但能跟着人眼一起移动,眨眼两次还可以变焦。
从这些报道来看,变焦的能力还挺惊人的,达到了32.6%。很多英文媒体也对此进行了大幅报道。

总觉得好像哪部间谍还是科幻电影里有这样的东西……
仔细回忆了一下,应该是《黑镜》第一季第三集《The Entire History of You》里的 Grain !
这个隐形眼镜就像脑机接口,能够记录、存储和回放佩戴者的所见所闻。而在故事里的架空社会中,这些回放记录,也成了佩戴者的身份和信用验证方式。
它的附加功能就包括变焦:

超人的 X-Ray Vision 也有类似的功能:

所以,有了这项技术,《黑镜》就要成真了?
以后,是不是就不用随身带望远镜了?
(如果能加上拍照录像的话,恐怕连相机都省了……)
并非如此。
硅星人查了这篇论文更多资料之后发现,这项研究的变焦效果,并没有这些媒体所报道的,“眨眼两次放大物体”那么夸张……
下图,你可以从下往上看。似乎也只是把最上下左右的四个字母又往画面边缘拉了一点点,远未达到可观的变焦效果。

更重要的问题是:这个研究成果压根就跟隐形眼镜没有关系……起码在论文的正文和补充资料里,都没有出现过相关的描述。
这项技术到底是什么样的?它真的有这么神奇吗?能变焦的隐形眼镜是怎么回事儿?
带着许多问题,硅星人对该论文[1] 的指导老师,加州大学圣迭戈分校机械和航空工程系蔡盛强副教授进行了采访。
能变焦的隐形眼镜VS人眼仿生机制
与其说是“能变焦的隐形眼镜”,更准确来讲,研究者其实设计了一个具备视线移动和小尺度变焦能力的人眼仿生机制。
下面的视频展示了装置是如何工作的:黑色的部分为涂了导电物质的薄膜,中间的白色是镜片,通电时会发生可观的形变,推动镜片平面位移。
这个装置其实工作机制跟人眼一样:眼球内外也有多块肌肉,控制眼球的位移和晶状体形变,让我们可以移动双眼,或者看清远处或近处的物体。

至于能不能实现《黑镜》里的那种变焦能力,似乎并非这一研究的重点。
“我们从来没有在论文里提到过隐形眼镜的概念。不知道是怎么误传出去的,”蔡教授在电话中告诉硅星人。
如果这些媒体记者阅读了论文,就会发现实验装置还有很多不适用于隐形眼镜的技术细节。
比如论文提到,在变焦时,薄膜上的电势高达5kV——目前没有隐形眼镜能够集成如此高的电压,未来一段时间内也不大可能;而且,大部分媒体报道没有阐述这个电压对人体的影响。
实际上,这并不是什么大问题。因为薄膜作为介电弹性材料,它本身是一个绝缘体,因此流经整个装置的电流非常小。

“这就好比冬天脱衣服,静电最高可以达到几万伏,”蔡教授表示,如果别人想复现这个实验,把条件改变用五号电池也可以驱动整个系统。
最核心的问题在于,即便目前世界最领先的技术,也无法把这个装置缩小到隐形眼镜的形态上。
“你想要把它放到隐形眼镜里,在大小、生物相容性等方面,我只能说还有很长的路要走。因此,我们没有提出隐形眼镜的概念。”
蔡教授解释,做这篇论文的目的,是为了提出一个使用眼电控制软体机器的人机交互界面。
据他了解,这应该是相关方向里世界上首个公开的概念证明 (proof-of-concept)。
正因为它只是一个概念证明,研究者们并没有任何使用高精尖的技术,采用的反而都是极为常见的材料,比如装置的骨架为亚克力和金属桩,镜片部位用的是硅胶管 生理盐水、模拟肌肉的则是 VHB 薄膜(也就是市售的3M双面胶),表面上涂了导电油脂:

为什么薄膜会像肌肉一样伸展收缩?因为它是一种电活性聚合物,通电时显著改变形状或体积,断电后又能恢复原貌。
本研究中所采用的 VHB 薄膜,是一种非常经典的电活性聚合物。因为它本身具有高绝缘性和弹性强度,通电时可以发生可观的形变,也被称为介电弹性材料 (dielectric polymer, DE)。
中美华裔学者共同完成技术研究
论文由来自中国和美国的华裔学者共同完成。第一作者李金嵘毕业于哈尔滨工业大学,曾在UC圣迭戈访学。在介电弹性材料的理论构建和商业应用研究方面,哈工大也是贡献最大的中国学府之一。
研究者仿照了眼部肌肉的排列组织形式,在镜片的东西南北每个方向上放置了两块薄膜,当通电时,装置内的薄膜和盐水形成了回路,从而激活了薄膜发生形变,模拟出了眼球肌肉的运动,导致了镜片的位移。
在镜片上,他们也加入了一块环状的薄膜,通、断电时会导致镜片的曲张。这就是变焦的实现方式:

你可以从这个视频里更直观地看到镜片位移和变焦的效果:
既然这个“人造眼球”可以活动了,又改如何控制它呢?
百科资料显示,眼球其实是一个双极性的球体,角膜和视网膜之间有电位差,在眼睛周围形成电场;如果你不是理科生,只需要明白,当眼球转动时,就会产生极其微弱的生物电现象。研究者正是从读取这种眼电 (electrooculographic, 简称EOG) 信号 ,控制薄膜的运动。

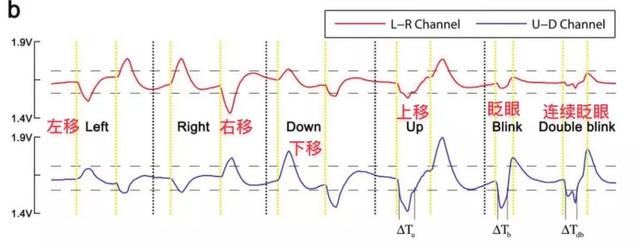
他们在人脸上放置几块电极片(左右通道和上下通道),通过测试、修正发现,通过识别两个通道所传回的波谷形状和组合模式,可以非常准确地识别出上下左右、眨眼、连续眨眼等动作:
读取信号的是很普通的 3M 医用电极片。至于信号处理和装置供电,则是采用市售的生物电传感器、Arduino 单片机、高抗电阻和普通的插座电源。
对于眼球运动所产生的生物电信号,医学方面有着较深的了解和应用;而在材料学领域,90年代就已出现介电弹性材料,也并非什么“黑科技”。
然而,将两者的工作原理结合,开发出首个从眼电信号到软机器人 (soft robot) 的人机交互界面,从而对人眼实现仿生——这一颇具想象力的机制,才是这篇论文的创新意义所在。
至于所谓的隐形眼镜,只能说是无稽之谈。

隐形眼镜不行,但是框架眼镜说不定可以
当然,这并不意味着,该技术不能被用于眼镜——只是隐形眼镜不行而已。
蔡教授表示,在视觉增强方面,介电弹性材料仍有着巨大的前景。
第一种应用场景是可调节框架眼镜。
比如两栖眼镜,因为光在空气和水等不同的介质中折射率不同,今后一副眼镜可以同时在陆地和水下使用。
再比如同时存在近视和老花眼的人士,同一副眼镜就可以满足日常需要,带来了极大的便利。这种眼镜和以往的双焦、多焦镜片有很大的不同:它可以在不同屈光度之间切换,而非同时具有多个焦距;而且因为软性镜片,便携性会有很大提升。
最近,已经有日本公司研制出类似的可调焦眼镜。现在,这类眼镜缺乏的东西——根据人眼需要及时、优雅地调整焦距的能力——被这篇论文补上了。

第二种是视觉假体 (visual prostheses):让盲人重获光明的人工视觉。
大多数视障者,往往只有视觉通路的一部分发生病变。通常,他们的神经组织的大部分结构和功能是完好的。而视觉假体的工作机制,就是把摄像机拍到的画面进行处理,转化为视神经可以接受的信号,从而让视障者产生视觉感受。
目前,人工视觉仍然处在研究和开发的初级阶段,距离临床尚远。而这篇论文中的技术,将帮助视障者更直观地控制视觉假体设备,不必再用头部、肢体的移动去调整视野。

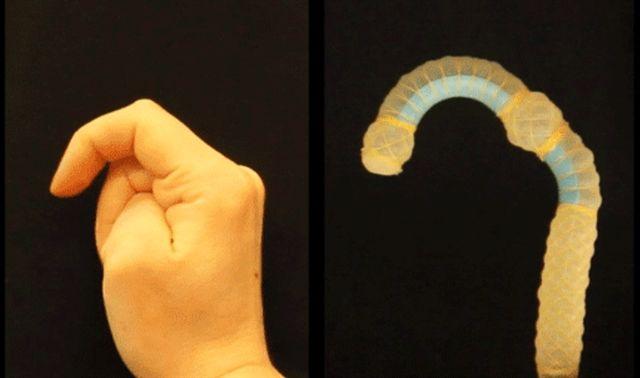
第三种是软体机器人,也是这篇研究的主要方向之一。
软体机器人和常见的硬机器人最大的区别,在于……更软,很容易变形。它的最主要好处,就是当安装在极其脆弱的场景下(比如眼内、脑内),能让人机交互变得更加安全。
除此之外,想要实现同样的功能,软体机器人可以做的比硬机器人更小。一个最直观的例子:如果真的有能倍数变焦的眼镜,它的最终尺寸会比相机镜头要小得多。
本质上,这颗介电弹性材料制成的“人造眼球”,就是一种仿生形态的软体机器人。
“越好的变焦镜头尺寸越大,而人眼用肌肉拉伸释放去变焦,不需要很大空间,是一种很好的仿生思路,”蔡教授表示。
软体机器人,特别是借助介电弹性体的思路,在最近5-10年有了很大的发展。未来,这项技术将会对医疗、视觉增强等诸多方面带来巨大的帮助。
不得不承认,针对这项技术的广泛误读,也或多或少体现了公众对于它的期待。
(但是,做科学报道还是要求真务实啊……)

[1] Jinrong Li, Yang Wang, Liwu Liu, Sheng Xu, Yanju Liu, Jinsong Leng, Shengqiang Cai. A Biomimetic Soft Lens Controlled by Electrooculographic Signal onlinelibrary.wiley/doi/abs/10.1002/adfm.201903762
喜欢这篇文章?
1)点击右下角的“好看”,让更多人看到这篇文章
2)分享到你的朋友圈和群里
3)赶快关注硅星人吧!

硅星人:(ID:guixingren123)
从科技到文化,从深度到段子,硅星人为你讲述关于硅谷的一切。
,




