译文
自由度是机械学中最重要的概念之一。这个概念广泛应用于机器人技术和运动学。 D.O.F的含义是“确定一个机构在空间中的位置需要多少个变量”。本文我们将学习如何计算机构的自由度。
自由度
如图4所示的机构,任何一个组件的角度和位置改变都会带动整个机构的改变。所以它的自由度是1 。同样地,凸轮从动机构的自由度也是1 。但是要确定滑块曲柄机构的位置,需要知道至少2个组件的角度或者位移。所以它的自由度是2 。

1
靠直觉就可以预估一些简单机构的自由度。但对于一个复杂机构来说,这个方法就不太奏效。下面我们来学习如何计算机构的自由度。
刚体的自由度
下图所示的位于空间中的刚体,它有三种平移运动,还有三种旋转运动,总计需要六个变量来确定其位置。因此刚体在空间中的自由度是6 。
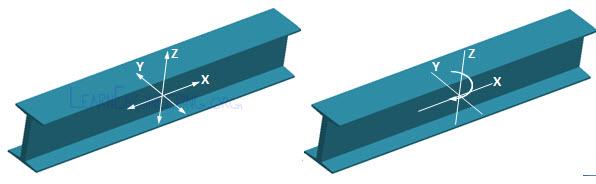
2
如果它位于一个平面中,就只有3种运动方式。两种平移运动和一种旋转运动。所以刚体在平面中的自由度是3 。

3
机构的自由度
机构是刚体或者连杆的集合体,通过运动副连接,其中一个连杆接地(固定)。如下图所示。

4
如果系统没有运动副连接,那么没有接地的连杆会有3个自由度。

5
所以自由度的总数是3(N-1),N代表连杆的数量,上图的机构中有3个连杆。不过,将它们通过运动副连接之后,连杆就没有相同的3个自由度。如果连杆之间的接合处有如下图所示的面接触,那么两个连杆将在X和Y轴方向拥有相同的平移运动。所以每一对运动副的自由度都将减少2个。下面的方程中,LP代表的是通过面接触的运动副数量。这样的运动副称为低副。在这一机构中有2个低副。
如果两个连杆的接合处是线接触或者点接触,两个连杆会沿着公法线进行相同的平移运动,不过沿切线方向的运动并不相同。所以通过这样的运动副连接,自由度的总数将减少1个。这样的运动副称为高副。如下图所示。

6
所以,这个机构只有1个自由度。也就是说,只需知道一个凸轮的位置,我们就能确定整个机构的位置。平面机构的自由度计算公式如下,它也被称为库茨巴赫方程。
D.O.F = 3(N - 1) -2LP - HP
方程中的N代表机构中的连杆总数。LP代表低副的数量,HP代表高副的数量。
四杆机构
回到原来的平面机构。它拥有4个连杆,4个低副。通过库茨巴赫方程可以算出这个机构的自由度是1 。

7
凸轮从动机构
该机构有3个连杆,2个低副,1个高副。所以它的自由度依然是1 。

8
五杆机构
该机构拥有5个连杆,5个低副。所以机动性是2 。

9
三维机构
如果机构是三维立体结构,利用相同的原理很容易推导出它的自由度计算公式如下:
D.O.F = 6(N - 1) -5P5 - 4P4 - 3P3 - 2P2 - 1P1
Pn代表的是限制n个自由度的运动副数量,比如P5就表示限制了5个自由度的运动副数量。这里的关键在于确定运动副的性质。你可以用这个方程来计算三维机构的自由度。
,




