本项目生成的三维立体画设计为用“墙眼”方式观看。看到它们的最好方法,就是让眼睛聚焦在图像后面的点(如墙上)。有点神奇,一旦在这些图案中感知到某样东西,眼睛就会自动将它作为关注的焦点,如果三维图像已“锁定”,你很难对它视而不见的(如果你仍然无法看到图像,请看Gene Levin的文章“How to View Stereograms and Viewing Practice”[1],或许有帮助)。

图8-1 一张令人费解的图像,可能让你感到痛苦[2]
8.1 工作原理三维立体画的工作原理是改变图像中图案之间的线性间距,从而产生深度的错觉。在观看三维立体画中的重复图案时,大脑会将间距解释为深度信息,如果有多个图案和不同的间距,尤其会这样。
8.1.1 感知三维立体画中的深度如果你的眼睛汇聚在图像背后一个假想的点,大脑将左眼看到的一些点与右眼看到的另一些点匹配起来,你将会看到这些点位于图像之后的一个平面上。到该平面的感知距离取决于图案中的间距的数量。例如,图8-2展示了3行A。这些A每行间的距离相等,但它们的水平间距从上至下增加。
如果用“墙眼”的方式来看,图8-2中最上面一行应该出现在纸后面,中间行应该看起来像在第一行后面一点,底部一行应该出现在最远的位置。文本“floating text”应该看起来“浮在”这几行顶部。
为什么大脑将这些图案的间距解读为深度?通常情况下,如果看远处的物体,你的双眼协作,聚焦并汇聚在同一点,双眼向内转,直接指向目标点。但用“墙眼”方式观看三维立体画时,聚焦和汇聚发生在不同的位置。眼睛专注于三维立体画,但大脑将重复的模式看成来自同一个虚拟(虚构的)对象,眼睛汇聚在图像背后的一个点,如图8-3所示。解耦的聚焦和汇聚叠加在一起,让你在三维立体画中看到深度。

图8-2 线性间距和深度知觉
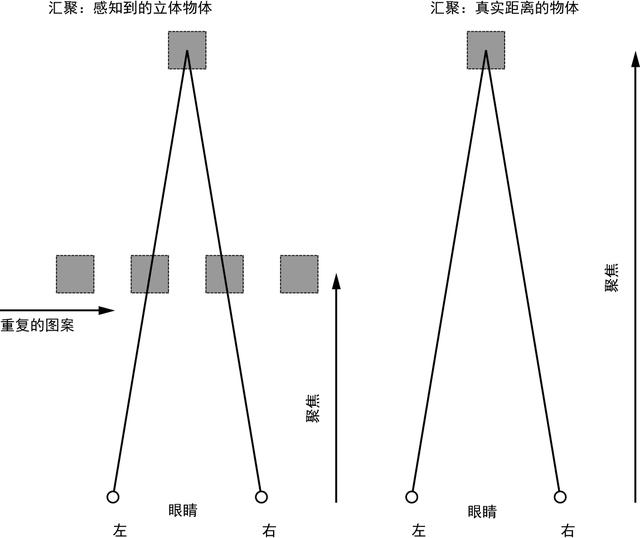
图8-3 在三维立体画中看到深度
三维立体画的感知深度取决于像素的水平间距。因为图8-2中的第一行具有最近的间隔,它出现在其他行的前面。然而,如果点的间距在图像中是变化的,大脑将认为每个点处于不同的深度,所以我们会看到一个虚拟的三维图像。
8.1.2 深度图“深度图”是这样一幅图像:其中每个像素的值表示深度值,即从眼睛到该像素表示的对象部分的距离。深度图往往表现为一幅灰度图,亮的区域表示近的点,暗的区域表示远的点,如图8-4所示。

图8-4 深度图
注意,鲨鱼的鼻子是图像中最亮部分,似乎最接近你。朝向尾部的较暗区域看起来最远。
因为深度图表示从每个像素中心到眼睛的深度或距离,所以可以用它来获得与图像中像素位置相关联的深度值。我们知道,在图像中,水平偏移被认为是深度。所以,如果按照对应像素值深度值的比例,来偏移(图案)图像中的像素,就会对该像素产生与深度图一致的深度知觉。如果对所有像素这样做,最终就会将整个深度图编码到图像中,生成三维立体画。
深度图的每个像素存储了深度值,并且该值的分辨率取决于表示它的位数。因为本章采用常见的8位图像,深度值的范围是[0,255]。
顺便说一下,图8-4中的图像就是用于创建图8-1中的三维立体画的深度图。你很快就能学会自己如何做到这一点。
该项目的代码将遵循以下步骤:
1.读入深度图;
2.读入一幅平铺图像或创建一个“随机点”平铺图像;
3.通过重复平铺图像创建一幅新图像。该图像的尺寸与深度图一致;
4.对新图像中的每个像素,根据该像素相关联的深度值,将它按比例地向右移;
5.将三维立体画写入一个文件。
8.2 所需模块本项目使用Pillow读取图片,访问它们的底层数据,创建和修改图像。
8.3 代码为了从输入的深度图生成三维立体画,首先重复一幅给定的平铺图像,生成一幅中间图像。接下来,生成一幅充满随机点的平铺图像。然后进入生成三维立体画的核心代码,即利用所提供的深度图中的信息,移动输入的图像。要查看完整的项目,请直接跳到8.4节。
8.3.1 重复给定的平铺图像我们从利用createTiledImage()方法开始,通过平铺一个图形文件,创建一幅新的图像。图像尺寸由dims元组指定,该元组形式为(width, height)。
# tile a graphics file to create an intermediate image of a set size
def createTiledImage(tile, dims):
# create the new image
❶ img = Image.new('RGB', dims)
W, H = dims
w, h = tile.size
# calculate the number of tiles needed
❷ cols = int(W/w) 1
❸ rows = int(H/h) 1
# paste the tiles into the image
for i in range(rows):
for j in range(cols):
❹ img.paste(tile, (j*w, i*h))
# output the image
return img
在❶行,利用提供的尺寸(dims)创建新的Python图像库(PIL)Image对象。新图像的尺寸由元组dims给出,形式是(width, height)。接着,保存平铺图像和输出文件的宽度和高度。在❷行,确定列数,在❸行,确定中间图像所需的行数,方法是用最终图像的尺寸除以平铺图像的尺寸。除的结果每次加1,如果输出图像的尺寸不是正好是平铺图像的整数倍,这也能确保右边最后的平铺图像不会缺失。如果没有这种预防措施,图像的右边可能被切断。然后,在❹行,循环遍历行和列,并用平铺图像填充它们。通过乘积(j*w, i*h),确定平铺图像左上角的位置,这样它能对准行和列。完成后,该方法返回指定尺寸的Image对象,用输入图像tile平铺。
8.3.2 从随机圆创建平铺图像如果用户不提供平铺图像,就利用createrandomTile()方法,用随机圆圈创建一张平铺图像。
# create an image tile filled with random circles
def createRandomTile(dims):
# create image
❶ img = Image.new('RGB', dims)
❷ Draw = ImageDraw.Draw(img)
# set the radius of a random circle to 1% of
# width or height, whichever is smaller
❸ r = int(min(*dims)/100)
# number of circles
❹ n = 1000
# draw random circles
for i in range(n):
# -r makes sure that the circles stay inside and aren't cut off
# at the edges of the image so that they'll look better when tiled
❺ x, y = random.randint(0, dims[0]-r), random.randint(0, dims[1]-r)
❻ fill = (random.randint(0, 255), random.randint(0, 255),
random.randint(0, 255))
❼ draw.ellipse((x-r, y-r, x r, y r), fill)
return img
在❶行,用dim给出的尺寸创建新的Image对象。用ImageDraw.Draw() ❷在该图像中画圆圈,用宽或高中较小值的1/100作为半径,画圆圈❸(Python的*运算符将dim元组中的宽度和高度值解包,这样就能传入到min()方法中)。
在❹行,设置要画的圆圈数为1000。然后调用random.randint(),获得范围为[0, width-r]和[0, height-r]的两个随机整数,从而算出每个圆圈的x和y坐标❺。“-r”确保生成的圆圈保持在width×height的图像矩形内部。不带-r,画的圆圈可能就在图像边缘,这意味着它会被切掉一部分。如果平铺这样的图像来创建三维立体画,结果不会好看,因为两个平铺图像之间没有空间。
要生成一个随机圆圈,先画出轮廓,然后填充颜色。在❻行,在[0,255]的范围内随机选取RGB值,用选择颜色填充。最后,在❼行,用draw中的ellipse()方法绘制每个圆圈。该方法的第一个参数是圆的边界矩形,它由左上角和右下角指定,分别为(x-r, y-r)和(x r, y r),其中(x, y)是该圆的圆心,r是半径。
让我们在Python解释器中测试这种方法。
>>> import autos
>>> img = autos.createRandomTile((256, 256))
>>> img.save('out.png')
>>> exit()
图8-5展示了测试的输出。

图8-5 尝试运行createRandomTile()
正如你在图8-5中看到的,我们已经创建了随机点的平铺图像。可以使用它来创建的三维立体画。
8.3.3 创建三维立体画现在,让我们创建一些三维立体画。createAutostereogram()方法完成了大部分工作,如下所示:
def createAutostereogram(dmap, tile):
# convert the depth map to a single channel if needed
❶ if dmap.mode is not 'L':
dmap = dmap.convert('L')
# if no image is specified for a tile, create a random circles tile
❷ if not tile:
tile = createRandomTile((100, 100))
# create an image by tiling
❸ img = createTiledImage(tile, dmap.size)
# create a shifted image using depth map values
❹ sImg = img.copy()
# get access to image pixels by loading the Image object first
❺ pixD = dmap.load()
pixS = sImg.load()
# shift pixels horizontally based on depth map
❻ cols, rows = sImg.size
for j in range(rows):
for i in range(cols):
❼ xshift = pixD[i, j]/10
❽ xpos = i - tile.size[0] xshift
❾ if xpos > 0 and xpos < cols:
❿ pixS[i, j] = pixS[xpos, j]
# display the shifted image
return sImg
在❶行,进行完整性检查,确保深度图和图像具有相同的尺寸。在❷行,如果用户没有提供平铺图像,就创建随机圆圈平铺图像。在❸行,创建一张平铺好的图像,符合提供的深度图的大小。然后,在❹行生成这张平铺好的图像的副本。
在❺行,调用Image.load()方法,将图像数据加载到内存中。该方法允许用形如[i, j]的二维数组来访问图像像素。在❻行,将图像的尺寸保存为行数和列数,将图像看成单个像素构成的网格。
三维立体画创建算法的核心在于,根据从深度图中收集的信息,移动平铺图像中像素的方式。要做到这一点,遍历平铺图像,处理每一个像素。在❼行,根据深度图pixD中的相关像素,查找偏移的值。然后将这个深度值除以10,因为这里用的是8位深度图,这意味着深度的范围是0到255。如果除以10,得到的深度值范围是0到25。由于深度图输入图像的尺寸通常是几百像素,所以这些偏移值很合适(尝试改变除数,看看它如何影响最终图像)。
在❽行,计算像素的新x位置,用平铺图像填充三维立体画。每隔w个像素,像素的值不断重复,由公式ai = ai w表示,其中的ai是在x轴下标i处的给定像素的颜色(因为考虑的是像素行,而不是列,所以忽略y方向)。
要创建深度感,就要让间隔(或重复的间距)与该像素的深度图值成正比。这样在最终的三维立体画图像中,每个像素和它前一次(周期地)出现相比,偏移了delta_i。这可以表示为bi=bi-w δt
这里,bi表示最后的三维立体画图像中,下标i处给定像素的颜色值。这正是❽行所做的事。深度图值为0(黑色)的像素没有偏移,被视为背景。
在❿行,用偏移的值替换每个像素。在❾行,检查确保没有试图访问不在图像中的像素,因为偏移,在图像边缘可能发生这种情况。
8.3.4 命令行选项现在,我们来看看该程序的main()方法,其中提供了一些命令行选项。
# create a parser
parser = argparse.ArgumentParser(description="Autosterograms...")
# add expected arguments
❶ parser.add_argument('--depth', dest='dmFile', required=True)
parser.add_argument('--tile', dest='tileFile', required=False)
parser.add_argument('--out', dest='outFile', required=False)
# parse args
args = parser.parse_args()
# set the output file
outFile = 'as.png'
if args.outFile:
outFile = args.outFile
# set tile
tileFile = False
if args.tileFile:
tileFile = Image.open(args.tileFile)
在❶行,像以前的项目一样,利用argparse为程序定义了一些命令行选项。一个必需的参数是深度图文件,两个可选的参数是平铺图像文件名和输出文件名。如果未指定平铺图像,程序会生成随机圆圈平铺图像。如果未指定输出文件名,则三维立体画会输出到as.png文件。
8.4 完整代码下面是完整的三维立体画程序。也可以从https://github.com/electronut/pp/blob/ master/autos/autos.py下载这段代码。
import sys, random, argparse
from PIL import Image, ImageDraw
# create spacing/depth example
def createSpacingDepthExample():
tiles = [Image.open('test/a.png'), Image.open('test/b.png'),
Image.open('test/c.png')]
img = Image.new('RGB', (600, 400), (0, 0, 0))
spacing = [10, 20, 40]
for j, tile in enumerate(tiles):
for i in range(8):
img.paste(tile, (10 i*(100 j*10), 10 j*100))
img.save('sdepth.png')
# create an image filled with random circles
def createRandomTile(dims):
# create image
img = Image.new('RGB', dims)
draw = ImageDraw.Draw(img)
# set the radius of a random circle to 1% of
# width or height, whichever is smaller
r = int(min(*dims)/100)
# number of circles
n = 1000
# draw random circles
for i in range(n):
# -r makes sure that the circles stay inside and aren't cut off
# at the edges of the image so that they'll look better when tiled
x, y = random.randint(0, dims[0]-r), random.randint(0, dims[1]-r)
fill = (random.randint(0, 255), random.randint(0, 255),
random.randint(0, 255))
draw.ellipse((x-r, y-r, x r, y r), fill)
# return image
return img
# tile a graphics file to create an intermediate image of a set size
def createTiledImage(tile, dims):
# create the new image
img = Image.new('RGB', dims)
W, H = dims
w, h = tile.size
# calculate the number of tiles needed
cols = int(W/w) 1
rows = int(H/h) 1
# paste the tiles into the image
for i in range(rows):
for j in range(cols):
img.paste(tile, (j*w, i*h))
# output the image
return img
# create a depth map for testing
def createDepthMap(dims):
dmap = Image.new('L', dims)
dmap.paste(10, (200, 25, 300, 125))
dmap.paste(30, (200, 150, 300, 250))
dmap.paste(20, (200, 275, 300, 375))
return dmap
# given a depth map image and an input image,
# create a new image with pixels shifted according to depth
def createDepthShiftedImage(dmap, img):
# size check
assert dmap.size == img.size
# create shifted image
sImg = img.copy()
# get pixel access
pixD = dmap.load()
pixS = sImg.load()
# shift pixels output based on depth map
cols, rows = sImg.size
for j in range(rows):
for i in range(cols):
xshift = pixD[i, j]/10
xpos = i - 140 xshift
if xpos > 0 and xpos < cols:
pixS[i, j] = pixS[xpos, j]
# return shifted image
return sImg
# given a depth map (image) and an input image,
# create a new image with pixels shifted according to depth
def createAutostereogram(dmap, tile):
# convert the depth map to a single channel if needed
if dmap.mode is not 'L':
dmap = dmap.convert('L')
# if no image is specified for a tile, create a random circles tile
if not tile:
tile = createRandomTile((100, 100))
# create an image by tiling
img = createTiledImage(tile, dmap.size)
# create a shifted image using depth map values
sImg = img.copy()
# get access to image pixels by loading the Image object first
pixD = dmap.load()
pixS = sImg.load()
# shift pixels horizontally based on depth map
cols, rows = sImg.size
for j in range(rows):
for i in range(cols):
xshift = pixD[i, j]/10
xpos = i - tile.size[0] xshift
if xpos > 0 and xpos < cols:
pixS[i, j] = pixS[xpos, j]
# return shifted image
return sImg
# main() function
def main():
# use sys.argv if needed
print('creating autostereogram...')
# create parser
parser = argparse.ArgumentParser(description="Autosterograms...")
# add expected arguments
parser.add_argument('--depth', dest='dmFile', required=True)
parser.add_argument('--tile', dest='tileFile', required=False)
parser.add_argument('--out', dest='outFile', required=False)
# parse args
args = parser.parse_args()
# set the output file
outFile = 'as.png'
if args.outFile:
outFile = args.outFile
# set tile
tileFile = False
if args.tileFile:
tileFile = Image.open(args.tileFile)
# open depth map
dmImg = Image.open(args.dmFile)
# create stereogram
asImg = createAutostereogram(dmImg, tileFile)
# write output
asImg.save(outFile)
# call main
if __name__ == '__main__':
main()
现在,我们用凳子(stool-depth.png)的深度图运行该程序。
$ python3 autos.py --depth data/stool-depth.png
图8-6左边展示了深度图,右边展示了生成的三维立体画。因为没有为平铺提供图像,这张三维立体画使用了随机生成的平铺图像。

图8-6 autos.py运行示例
现在,让我们给定一个平铺图像作为输入。像前面一样使用stool-depth.png深度图,但这一次,提供图像escher-tile.jpg[3]作为平铺图像。
$ python3 autos.py --depth data/stool-depth.png –tile data/escher-tile.jpg
图8-7展示了输出。

图8-7 使用平铺图像的autos.py运行示例
8.6 小结在本项目中,我们学习了如何创建三维立体画。给定深度图的图像,我们现在可以创建随机点的三维立体画,或用提供的图像来平铺。
如果你想知道如何利用编程来理解和探索想法。那么你可以看看这本《Python极客项目编程》,这本书的项目假设你了解基本的Python语法和基本的编程概念,并假设你熟悉高中数学知识。我已经尽了最大的努力,详细解释了所有项目中需要的数学知识。
《Python极客项目编程》

《Python极客项目编程(异步图书出品)》([美],Mahesh,Venkitachalam)【摘要 书评 试读】- 京东图书item.jd.com
本书包含了一组富有想象力的编程项目,它们将引导你用Python 来制作图像和音乐、模拟现实世界的现象,并与
Arduino 和树莓派这样的硬件进行交互。你将学习使用常见的Python 工具和库,如numpy、matplotlib 和pygame,
来完成以下工作:
● 利用参数方程和turtle模块生成万花尺图案;
● 通过模拟频率泛音在计算机上创作音乐;
● 将图形图像转换为ASCII文本图形;
● 编写一个三维立体画程序,生成隐藏在随机图案下的3D图像;
● 通过探索粒子系统、透明度和广告牌技术,利用OpenGL着色器制作逼真的动画;
● 利用来自CT和MRI扫描的数据实现3D可视化;
● 将计算机连接到Arduino编程,创建响应音乐的激光秀。
通过本书,你可以享受作为极客的真正乐趣!
作者通过一系列不简单的项目,向你展示如何用Python来解决各种实际问题。在学习这些项目时,你将探索Python编程语言的细微差别,并学习如何使用一些流行的Python库。但也许更重要的是,你将学习如何将问题分解成几个部分,开发一个算法来解决这个问题,然后从头用Python来实现一个解决方案。解决现实世界的问题可能很难,因为它们往往是开放式的,并且需要各个领域的专业知识。但Python提供了一些工具,协助解决问题。克服困难,寻找实际问题的解决方案,这是成为专家级程序员的旅途中最重要的环节。
让我们来看看有哪些练手项目?第一部分:热身运动第1章展示了如何解析iTunes播放列表文件,并从中收集有用的信息,如音轨长度和共同的音轨。在第2章中,我们使用参数方程及海龟作图法,绘制类似万花尺产生的那些曲线。
- 第1章 解析iTunes播放列表
- 第2章 万花尺
这部分是用数学模型来模拟现象。在第3章中,我们将学习如何实现Conway游戏的生命游戏算法,产生动态的模式来创建其他模式,以模拟一种人工生命。第4章展示了如何用Karplus-Strong算法来创建逼真的弹拨音。然后,在第5章中,我们将学习如何实现类鸟群算法,模拟鸟类的聚集行为。
- 第3章 Conway生命游戏
- 第4章 用Karplus-Strong算法产生音乐泛音
- 第5章 类鸟群:仿真鸟群
这部分介绍使用Python读取和操作2D图像。第6章展示了如何根据图像创建ASCII码艺术图。在第7章中,我们将进行照片拼接。在第8章中,我们将学习如何生成三维立体图,它让人产生3D图像的错觉。
- 第6章 ASCII文本图形
- 第7章 照片马赛克
- 第8章 三维立体画
这一部分的项目使用OpenGL的3D图形库。第9章介绍使用OpenGL创建简单3D图形的基本知识。在第10章中,我们将创建粒子模拟的烟花喷泉,它用数学和OpenGL着色器来计算和渲染。在第11章中,我们将使用OpenGL着色器来实现立体光线投射算法,来渲染立体数据,该技术常用于医疗影像,如MRI和CT扫描。
- 第9章 理解OpenGL
- 第10章 粒子系统
- 第11章 体渲染
在最后一部分中,我们将用Python来探索Arduino微控制器和树莓派。在第12章中,我们将利用Arduino,通过一个简单电路读取并标绘传感器数据。在第13章中,我们将利用Python和Arduino来控制两个旋转镜和激光器,生成响应声音的激光秀。在第14章中,我们将使用树莓派打造一个基于网络的气象监测系统。
- 第12章 Arduino简介
- 第13章 激光音乐秀
- 第14章 基于树莓派的天气监控器