1)实验平台:正点原子STM32mini开发板2)摘自《正点原子STM32 不完全手册(HAL 库版)》关注官方微信号公众号,获取更多资料:正点原子

第十章 独立看门狗(IWDG)实验
这一章,我们将向大家介绍如何使用 STM32 的独立看门狗(以下简称 IWDG)。STM32 内
部自带了 2 个看门狗:独立看门狗(IWDG)和窗口看门狗(WWDG)。这一章我们只介绍独
立看门狗,窗口看门狗将在下一章介绍。在本章中,我们将通过按键 WK_UP 来喂狗,然后通
过 DS0 提示复位状态。本章分为如下几个部分:
10.1 STM32 独立看门狗简介
10.2 硬件设计
10.3 软件设计
10.4 下载验证
10.1 STM32 独立看门狗简介
STM32 的独立看门狗由内部专门的 40Khz 低速时钟驱动,即使主时钟发生故障,它也仍然
有效。这里需要注意独立看门狗的时钟是一个内部 RC 时钟,所以并不是准确的 40Khz,而是
在 30~60Khz 之间的一个可变化的时钟,只是我们在估算的时候,以 40Khz 的频率来计算,看
门狗对时间的要求不是很精确,所以,时钟有些偏差,都是可以接受的。
独立看门狗有几个寄存器与我们这节相关,我们分别介绍这几个寄存器,首先是键值寄存
器 IWDG_KR,该寄存器的各位描述如图 10.1.1 所示:
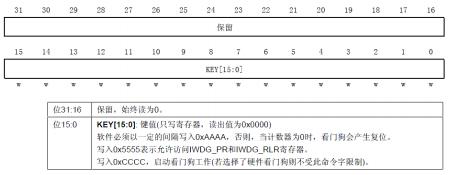
图 10.1.1 IWDG_KR 寄存器各位描述
在键寄存器(IWDG_KR)中写入 0xCCCC,开始启用独立看门狗;此时计数器开始从其复位
值 0xFFF 递减计数。当计数器计数到末尾 0x000 时,会产生一个复位信号(IWDG_RESET)。 无
论何时,只要键寄存器 IWDG_KR 中被写入 0xAAAA, IWDG_RLR 中的值就会被重新加载到
计数器中从而避免产生看门狗复位 。
IWDG_PR 和 IWDG_RLR 寄存器具有写保护功能。要修改这两个寄存器的值,必须先向
IWDG_KR 寄存器中写入 0x5555。将其他值写入这个寄存器将会打乱操作顺序,寄存器将重新
被保护。重装载操作(即写入 0xAAAA)也会启动写保护功能。
接下来,我们介绍预分频寄存器(IWDG_PR),该寄存器用来设置看门狗时钟的分频系数,
最低为 4,最高位 256,该寄存器是一个 32 位的寄存器,但是我们只用了最低 3 位,其他都是
保留位。预分频寄存器各位定义如图 10.1.2 所示:

图 10.1.2 IWDG_ PR 寄存器各位描述
在介绍完 IWDG_PR 之后,我们介绍一下重装载寄存器。该寄存器用来保存重装载到计数
器中的值。该寄存器也是一个 32 位寄存器,但是只有低 12 位是有效的,该寄存器的各位描述
如图 10.1.3 所示:

图 10.1.3 重装载寄存器各位描述
只要对以上三个寄存器进行相应的设置,我们就可以启动 STM32F1 的独立看门狗。独立
看 门 狗 相 关 的 库 函 数 操 作 函 数 在 文 件 stm32f1xx_hal_iwdg.c 和 对 应 的 头 文 件
stm32f1xx_hal_iwdg.h 中。
接下来我们讲解一下通过库函数来配置独立看门狗的步骤:
1)取消寄存器写保护(向 IWDG_KR 写入 0X5555)
首先我们必须取消 IWDG_PR 和 IWDG_RLR 寄存器的写保护,这样才可以设置寄存器
IWDG_PR 和 IWDG_RLR 的值。取消写保护和设置预分频系数以及重装载值在 HAL 库中是通
过函数 HAL_IWDG_Init 实现的。该函数声明为:
HAL_StatusTypeDef HAL_IWDG_Init(IWDG_HandleTypeDef *hiwdg);
该函数只有一个入口参数 hiwdg,该参数是 IWDG_HandleTypeDef 结构体指针类型。接下
来我们看看结构体 IWDG_HandleTypeDef 定义:
typedef struct
{
IWDG_TypeDef *Instance;
IWDG_InitTypeDef Init;
}IWDG_HandleTypeDef;
成员变量 Instance 用来设置看门狗寄存器基地址,实际上在 HAL 库中已经通过标识符定义
了,这里对于独立看门狗直接设置为标识符 IWDG 即可。
成员变量 Init 是一个 IWDG_InitTypeDef 结构体类型,该结构体只有 2 个成员变量,分别用
来设置独立看门狗的预分频系数和重装载值,定义如下:
typedef struct
{
uint32_t Prescaler;
uint32_t Reload;
}IWDG_InitTypeDef;
成员变量 Lock 是一个锁存变量,该变量在 HAL 库中当操作配置 IWDG 之前设置为锁住
LOCK,当配置操作完成之后设置为 UNLOCK,实际上是一个操作状态标识符。
成员变量 State 也是 HAL 定义的一个过程标识符,用来记录 IWDG 处理状态。
HAL_IWDG_Init 函数使用的一般方法为:
IWDG_HandleTypeDef IWDG_Handler; //独立看门狗句柄
IWDG_Handler.Instance=IWDG;
//独立看门狗
IWDG_Handler.Init.Prescaler=IWDG_PRESCALER_64; //设置 IWDG 分频系数
IWDG_Handler.Init.Reload=500; //重装载值
HAL_IWDG_Init(&IWDG_Handler);
上面程序的作用是初始化 IWDG,设置分频系数为 64,重装载值为 500。设置完预分频系
数和重装载值后,我们就可以知道看门狗的喂狗时间(也就是看门狗溢出时间),该时间的计算
方式为:
Tout=((4×2^prer) ×rlr) /32
其中 Tout 为看门狗溢出时间(单位为 ms);prer 为看门狗时钟预分频值(IWDG_PR 值),
范围为 0~7;rlr 为看门狗的重装载值(IWDG_RLR 的值);
比如我们设定 prer 值为 4(4 代表的是 64 分频,HAL 库中可以使用宏定义标识符
IWDG_PRESCALER_64),rlr 值为 500,那么就可以得到 Tout=64×500/32=1000ms,这样,看
门狗的溢出时间就是 1s,只要你在一秒钟之内,有一次写入 0XAAAA 到 IWDG_KR,就不会
导致看门狗复位(当然写入多次也是可以的)。这里需要提醒大家的是,看门狗的时钟不是准确
的 32Khz,所以在喂狗的时候,最好不要太晚了,否则,有可能发生看门狗复位。
2)重载计数值喂狗(向 IWDG_KR 写入 0XAAAA)
在 HAL 中重载计数值的函数是 HAL_IWDG_Refresh,该函数声明为:
HAL_StatusTypeDef HAL_IWDG_Refresh(IWDG_HandleTypeDef *hiwdg);
该函数有一个入口参数为前面讲解的 IWDG_HandleTypeDef 结构体类型指针,它的作用是
把值0xAAAA写入到IWDG_KR寄存器,从而触发计数器重载,即实现独立看门狗的喂狗操作。
3) 启动看门狗(向 IWDG_KR 写入 0XCCCC)
HAL 库函数里面启动独立看门狗的函数是__HAL_IWDG_START:
__HAL_IWDG_START(hiwdg);
通过上面 3 个步骤,我们就可以启动 STM32F1 的独立看门狗了,使能了看门狗,在程序
里面就必须间隔一定时间喂狗,否则将导致程序复位。利用这一点,我们本章将通过一个 LED
灯来指示程序是否重启,来验证 STM32F1 的独立看门狗。
在配置看门狗后,DS0 将常亮,如果 KEY_UP 按键按下,就喂狗,只要 KEY_UP 不停的
按,看门狗就一直不会产生复位,保持 DS0 的常亮,一旦超过看门狗定溢出时间(Tout)还没
按,那么将会导致程序重启,这将导致 DS0 熄灭一次。
10.2 硬件设计
本实验用到的硬件资源有:
1) 指示灯 DS0
2) WK_UP 按键
3) 独立看门狗
前面两个在之前都有介绍,而独立看门狗实验的核心是在 STM32 内部进行,并不需要外
部电路。但是考虑到指示当前状态和喂狗等操作,我们需要 2 个 IO 口,一个用来输入喂狗信
号,另外一个用来指示程序是否重启。喂狗我们采用板上的 WK_UP 键来操作,而程序重启,则是通过 DS0 来指示的。
10.3 软件设计
软件设计我们依旧是在上一章代码的基础上修改,因为没用到外部中断,所以先去掉 exti.c
(注意,此时 HARDWARE 组仅剩:led.c 和 key.c),然后在 HARDWARE 文件夹下面新建一个
WDG 的文件夹,用来保存与看门狗相关的代码。再打开工程,新建 wdg.c 和 wdg.h 两个文件,
并保存在 WDG 文件夹下,并将 WDG 文件夹加入头文件包含路径。
在 wdg.c 里面输入如下代码:
#include "wdg.h"
IWDG_HandleTypeDef IWDG_Handler; //独立看门狗句柄
//初始化独立看门狗
//prer:分频数:IWDG_PRESCALER_4~IWDG_PRESCALER_256
//rlr:自动重装载值,0~0XFFF.
//时间计算(大概):Tout=((4*2^prer)*rlr)/32 (ms).
void IWDG_Init(u8 prer,u16 rlr)
{
IWDG_Handler.Instance=IWDG;
IWDG_Handler.Init.Prescaler=prer;
//设置 IWDG 分频系数
IWDG_Handler.Init.Reload=rlr;
//重装载值
HAL_IWDG_Init(&IWDG_Handler);
//初始化 IWDG,默认会开启独立看门狗
}
//喂独立看门狗
void IWDG_Feed(void)
{
HAL_IWDG_Refresh(&IWDG_Handler); //喂狗
}
该代码就 2 个函数,void IWDG_Init(u8 prer,u16 rlr)是独立看门狗初始化函数,就是按照
上面介绍的步骤来初始化独立看门狗的。该函数有 2 个参数,分别用来设置与预分频数与重装
寄存器的值的。通过这两个参数,就可以大概知道看门狗复位的时间周期为多少了。其计算方
式上面有详细的介绍,这里不再多说了。
void IWDG_Feed(void)函数,该函数用来喂狗,因为 STM32 的喂狗只需要向关键字寄存器
写入 0XAAAA 即可,也就是调用库函数 HAL_IWDG_Refresh,所以这个函数也是很简单的。
iwdg.h 内容比较简单,主要是一些函数申明,这里我们忽略不讲解。
接下来我们看看主函数,主程序里面我们先初始化一下系统代码,然后启动按键输入和看
门狗,在看门狗开启后马上点亮 LED0(DS0),并进入死循环等待按键的输入,一旦 KEY_UP
有按键,则喂狗,否则等待 IWDG 复位的到来。该部分代码如下:
int main(void)
{
HAL_Init(); //初始化 HAL 库
Stm32_Clock_Init(RCC_PLL_MUL9); //设置时钟,72M
delay_init(72);
//初始化延时函数
uart_init(115200);
//初始化串口
LED_Init();
//初始化 LED
KEY_Init();
//初始化按键
delay_ms(100); //延时 100ms 再初始化看门狗,LED0 的变化"可见"
IWDG_Init(IWDG_PRESCALER_64,500);//分频数为 64,重载值为 500,溢出时间为 1s
LED0=0;
while(1)
{
if(KEY_Scan(0)==WKUP_PRES) //如果 WK_UP 按下,喂狗
{
IWDG_Feed();
//喂狗
}
delay_ms(10);
}
}
上面的代码,鉴于篇幅考虑,我们没有把头文件给列出来(后续实例将会采用类同的方式
处理),因为以后我们包含的头文件会越来越多,大家想看,可以直接打开光盘相关源码查看。
至此,独立看门狗的实验代码,我们就全部编写完了,接着要做的就是下载验证了,看看我们
的代码是否真的正确。
10.4 下载验证
在编译成功之后,我们就可以下载代码到 MiniSTM32 开发板上,实际验证一下,我们的程
序是否正确。下载代码后,可以看到 DS0 不停的闪烁,证明程序在不停的复位,否则只会 DS0
常亮。这时我们试试不停的按 WK_UP 按键,可以看到 DS0 就常亮了,不会再闪烁。说明我们
的实验是成功的
,




