首先去你使用的设备官网下载你使用的EtherCAT从设备的ESI文件(一般买的时候供应商会直接提供)
以下以松下伺服为例:
在Sysmac Studio从添加好你的PLC的,然后再EtherCAT这里右击你的主设备,选择显示ESI库

点击安装文件,选择你下载的ESI文件

ESI文件管理界面

松下伺服ESI文件

添加完成后效果
之后打开工具箱,工具箱里面就有新添加的伺服了

最下面AC Servo Driver就是松下
先选择AC Servo Driver,底下会出现里面的所有型号,选择你使用的型号右键-插入就行了

工具箱界面
添加完效果
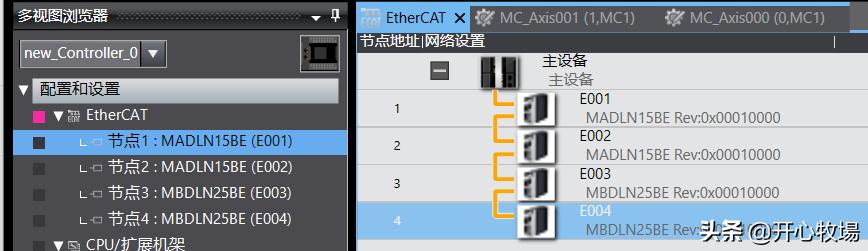
EtherCAT组态界面
如果需要轴能动,还需要配置轴参数,就是把轴和节点设备一一对应

右击轴设置添加,并绑定节点号
配置轴系的通用参数

配置轴系的过程数据 过程数据必须配置对,不然读不到伺服的状态数据

过程数据配置
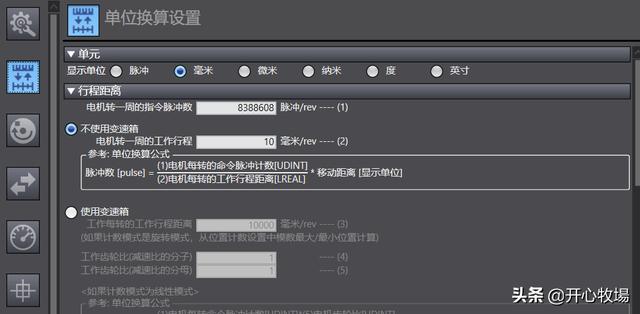
配置齿轮比,一周脉冲数直接问供应商就行
配置速度限制

配置限位

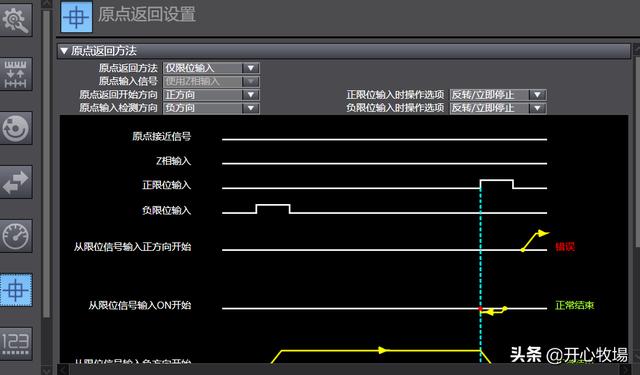
配置回零参数
全部配置结束后,可以试运行看看配置的对不对,试运行没问题,调用指令就可以写程序了

试运行打开
,




