AI时代降临,人类准备好了吗?
文章来源:寸匠
ID:gh_064edcd6b428
作者: 寸外艺术灵感
编辑:捌条

AI时代降临
人类准备好了吗
未来人工智能肩负“世界方案”的使命
2020世界人工智能大会
圆满在上海落下帷幕
本次大会汇聚全球最有影响力的人工智能
科学家、企业家
围绕技术前沿和发展趋势分享观点
寸匠关注科技
本期特别与大家分享最新科研成果
01
仿生雨燕
安全的空中杂技团

BionicSwifts(仿生雨燕 ):它们敏捷灵活,飞圈和急转弯。通过与基于无线电的室内GPS交互,五只人工燕子可以在定义的空域中以协调和自主的方式移动。
设计机器人鸟类时,重点是使用轻质结构,就像它们的生物学榜样一样。因为工程技术与自然技术一样适用:移动的重量越少,材料的使用和能耗就越低。因此,仿生鸟的体长为44.5厘米,翼展为68厘米,仅重42克。为了尽可能逼真地执行飞行操作,机翼以鸟类的羽毛为模型。单个薄片由超轻,柔软但非常坚固的泡沫制成,并像木瓦一样彼此叠放。它们连接到碳纤维套筒上,并像自然模型一样连接到实际的手和手臂。



在机翼向上冲程期间,单个薄片会扇出,以便空气可以流过机翼。这意味着鸟只需要较少的力量即可将翅膀拉起。在下冲程期间,叶片会关闭,因此鸟类可以产生更多的飞行力。由于机翼是这种接近自然的复制品,因此BionicSwifts飞行性能比以前的机翼跳动驱动器更好。
鸟的身体包括机翼拍打机构的紧凑结构,通信技术,机翼拍打的控制部件以及电梯、机尾、无刷电机、两个伺服电机、电池、变速箱以及用于无线电,控制和定位的各种电路板都安装在很小的空间中。电机和机械手的智能交互可以例如针对各种动作精确调整机翼跳动的频率和电梯的迎角。



具有超宽带技术的基于无线电的室内GPS可实现BionicSwifts的协调和安全飞行。为此,在一个房间中安装了多个无线电模块。这些锚点彼此定位并定义受控的空域。每只机械鸟也都配备了无线电标记。这会将信号发送到锚点,然后锚点可以确定鸟类的确切位置,并将收集到的数据发送到充当导航系统的中央主计算机。


收集到的数据可用于路线规划,以便预先设置的路线为鸟类提供飞行路线。如果鸟类由于风或热等环境影响的突然变化而偏离飞行路线,则它们会立即自行校正飞行路线并在这种情况下自动进行干预,而无需人工驾驶。即使目视接触部分受到障碍物的阻碍,无线电通信也可以实现精确的位置检测。使用UWB作为无线电技术可确保安全无故障的运行。
飞行物体和GPS路线的智能联网使3D导航系统可以在未来的联网工厂中使用。精确定位可以改善工艺流程并预见瓶颈。此外,还可以使用自动飞行机器人来运输物料,从而优化具有其飞行走廊的工厂内空间的使用。
02
仿生移动助手
带有气动抓手的移动机器人系统
BionicMobileAssistant可以在太空中自主移动,可以独立识别物体,自适应地抓住它们并与人类一起工作。所获取的信息的处理由预先使用数据增强训练的神经网络执行。将来,工人和机器人将越来越紧密地合作。Festo一直在深入研究可以减轻人们危险活动并同时不构成风险的系统。人工智能在这里起着核心作用。


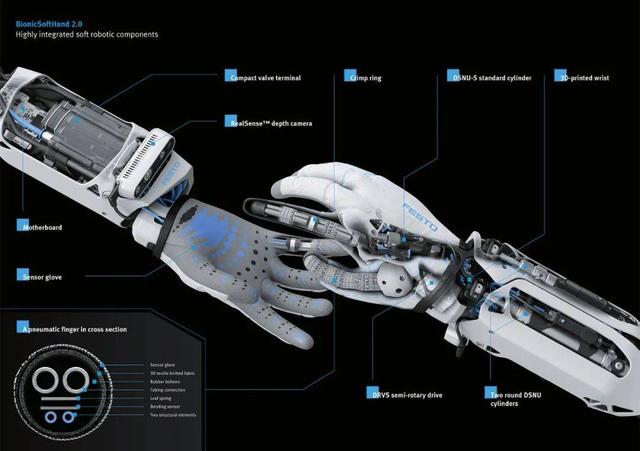
Festo与苏黎世联邦理工学院合作开发了仿生移动助手,它由三个子系统组成:移动机器人、电动机器人手臂和BionicSoftHand 2.0(气动机械手)。气动抓爪的灵感来自人手,是BionicSoftHand自2019年以来的进一步发展。
借助电动机器人手臂,可以实现快速,动态的运动。轻巧的设计和高度集成的驱动模块仅重一公斤,确保了这一点。在这些所谓的DynaDrives中,电机齿轮箱、电机控制电子设备和传感器安装在很小的空间中。该臂具有很高的功率密度,在60Nm的驱动扭矩下为1kW,大大超过了常规工业机器人的功率密度,得益于基于模型的力控制和算法来补偿动态影响与周围环境非常敏感地相互作用。


该手戴着在指尖、手掌和机器人手外部带有触觉力传感器的手套,这使他们能够感觉到要抓握的物体有多难以及它在手中的贴合程度,并使抓握力适应所讨论的物体,就像人类一样。另外,深度摄像头位于手腕内侧,用于视觉对象检测。
气动机械手的手指由带有空气腔室的柔性波纹管结构组成,该腔室由坚固且柔软的织物编织物覆盖。这使手轻巧灵活适应性强,但能够施加强大的力量。与2019年的BionicSoftHand一样,气动手指通过带有压电阀的紧凑型阀岛进行控制,该压电阀直接安装在手上。

借助摄像机图像,即使被部分遮盖,机械手也可以识别并抓住各种对象。经过适当的训练后,手还可以根据记录的数据评估对象,从而区分好坏。信息由神经网络处理,该神经网络已使用数据增强进行了预先训练。
为了获得可能的最佳结果,神经网络需要大量的信息来进行自我定位。这意味着可用的训练图像越多,它变得越可靠。由于这通常很耗时,因此自动扩充数据库是一个好主意。此过程称为数据扩充。通过少量修改一些源图像(例如具有不同照明条件或视角)并复制它们,系统获得了可以独立工作的综合数据集。


该系统具有完整的板载电源:用于手臂和机器人的电池位于体内。用于气动指针的压缩空气盒安装在上臂中,这意味着机器人不仅可以移动,还可以自主移动。它的移动性和自主能源供应使BionicMobileAssistant可以灵活地用于在变化的位置执行不同的任务-以适应不断变化的生产环境。
该系统将预定用作人类的直接助手,由于采用了模块化概念,BionicSoftHand 2.0也可以快速安装在其他机器人手臂上并进行调试。抓具与BionicCobot或BionicSoftArm结合使用,例如,形成了一个完全气动的机器人系统,由于其固有的灵活性,该系统可以与人类并驾齐驱。
03
仿生飞狐
具有智能运动学的超轻型飞行物体

飞行的梦想是人类最古老的梦想之一。在这方面,我们一直以着迷的眼光看待动物世界,这个世界以各种方式展示了它是如何完成的。同样在仿生学习网络中,飞行始终是重复出现的主题。


首先仿生学专家仔细研究了蝠上的鳍。尽管这种生物生活在水中,但其大型胸鳍在游泳时却像翅膀一样上下摆动。得益于其轻巧的结构,氦气提供的升力以及Fin FinEffect®带来的跳动翼驱动,它像在海洋中的自然榜样一样在空中飞行。从2009年开始,AirPengiuns也采用了类似的概念。他们的飞行技术与他们的生物模型的游泳技术非常接近。被动扭曲的机翼允许产生正向和反向推力。
受鲱鱼启发,仿生技术平台可自行启动,飞行和降落-无需额外的驱动力。它的翅膀不仅会上下打动,而且还会以特定的方式扭曲。这是通过主动铰接扭转驱动器完成的,该驱动器与复杂的控制系统配合使用,可达到以前在飞行中未达到的效率水平。



Festo在2015年借助eMotionButterflies完善了轻质结构和小型化:每只仿生蝴蝶的重量仅为32克。为了尽可能地复制其自然的榜样,eMotionButterflies具有高度集成的车载电子设备。他们能够精确地单独激活翅膀,从而快速移动。安装在房间里的十个摄像头使用它们的红外标记来记录蝴蝶。摄像机将位置数据传输到中央主计算机,该计算机从外部协调蝴蝶。
与自然界中生物的飞行行为不同,将其转让给技术时,主要挑战始终是其轻巧的结构和功能的集成。借助BionicFlyingFox,其高度受力运动学的所有铰接点都在一个平面上,以使整个机翼像剪刀一样折叠在一起,Festo现在已经解密了动物界发现的所有类型的飞行。然而,自然界提供了许多其他独特的解决方案,这将激发仿生学团队在未来寻找新的技术解决方案。
04
BionicANT
协同工作的榜样

对于BionicANT,Festo不仅将天然蚂蚁的精细解剖作为榜样。使用复杂的控制算法,这些动物的合作行为也首次被转移到了技术领域。
就像其自然规律一样,BionicANTs在明确的规则下协同工作。他们彼此沟通,彼此协调行动和行动。因此,人工蚂蚁演示了自治的各个组件如何作为整体网络系统一起解决复杂的任务。


然而,不仅人造蚂蚁的合作行为是惊人的,他们的生产方法也是独一无二的。在3D MID工艺中,激光烧结的部件上装饰有可见的导体结构,因此它们同时承担设计和电气功能。
以抽象的方式,这种合作行为为明天的工厂提供了有趣的方法。未来的生产系统将基于智能组件,这些组件可以根据不同的生产场景灵活地进行调整,从而承担更高级别的任务。


在腿部使用的执行器技术中,Festo利用了压电技术的优势。压电元件可以非常精确,快速地控制。它们消耗很少的能量,几乎耐磨并且不需要太多空间。
因此,在每个大腿上都安装了三个三态压电陶瓷弯曲传感器,它们既用作执行器,又用作设计元素。通过偏转顶部弯曲传感器,蚂蚁抬起它的腿。下方有一对,可以精确地将每条腿向前和向后偏转。

构思周密的概念:在最小的空间中,每种蚂蚁都结合了众多组件、技术和功能。
05
AquaJellies 2.0
集体中的自主行为

就像它们的自然状态一样,AquaJellies可以在水中优雅地滑行,看似毫不费力。它们的自适应触角确保了这一点,触角由体内的电驱动器控制。集成的通信和传感器技术以及实时诊断功能,即使在有限的空间内,也可以协调协调,集体地行为多个水母。
Festo在2008年汉诺威博览会上首次展示了AquaJellies。自那时以来,开发人员一直在致力于改进通信技术以及在智能手机上监控单个水母的状况。可以使用一个应用程序单独记录和跟踪每个AquaJelly的当前状况。


借助AquaJellies 2.0,Festo展现了水的潜力以及关于水技术领域高效系统未来前景的想法。在过程工业以及因此在水技术领域中使用的所有设备中,过程监视和状态监视都是重要的主题。



自组织的任务已经可以在当今的废水技术中找到,例如,涉及将来自几个分散式雨水溢流池的收集雨水输送到中央污水处理厂的情况。同时,状态监视可实现有效的运营管理,维护和维护。
06
仿生车轮
像flic-flac蜘蛛一样走路和滚动

新的驱动概念和惊人的运动形式一直在我们的仿生学习网络中发挥重要作用。借助BionicWheelBot,受flic-flac蜘蛛的启发,出现了一种具有非常特殊性能的步行机器人。
BionicWheelBot的生物学模型是flic-flac蜘蛛(cebrennus rechenbergi)。它生活在撒哈拉沙漠边缘的埃尔格·切比沙漠中。柏林工业大学的仿生处理器Ingo Rechenberg教授于2008年在此发现了它。这种似蝇似的蜘蛛可以像其他蜘蛛一样行走。然而,它也可以在空中翻腾和翻腾,从而将自身推向空中。


flic-flac蜘蛛非常适应其栖息地。在平坦的地面上,所谓的滚动模式的速度是步行时的两倍。但是在不平的地方,它通常走得更快。在可以找到两种类型地形的沙漠中,它可以安全有效地移动。


自发现以来,Rechenberg教授一直致力于将其运动方式转移到技术领域。对蜘蛛行为的研究导致了各种机器人的设计,这些机器人可以在困难的地形上自行推进。对于BionicWheelBot,来自柏林的科学家现在与我们的仿生团队一起开发了运动学和驱动概念。


从行走模式转换为滚动模式:为了开始滚动,BionicWheelBot在其身体的左侧和右侧分别弯曲三个腿以制成一个轮子。走路时,两只脚折叠起来,然后伸展,将卷起的蜘蛛推离地面,并在滚动时不断向前推。这样可以防止BionicWheelBot磨碎并停止运转,并确保即使在崎岖地形上它也可以向前移动。在滚动模式下,人造蜘蛛与其自然的榜样一样,比走路时快得多。同时,机器人甚至可以克服多达5%的坡度。
沙漠中的BionicWheelBot:作为生物学模型的flic-flac蜘蛛的发现者在其“自然环境”中也测试了BionicWheelBot。
END
自1990年代初以来
Festo一直在密切关注仿生学领域
因此
Festo于2006年启用了仿生学习网络
从那时起,每年在汉诺威工业博览会上
都会展示作为该网络的一部分开发的
最新仿生技术平台
最后来回顾Feato最新的仿生作品
和历年经典的作品吧







注意:本文含有投票,请到设计癖官网(shejipi.com)参加投票。
,




