本文编辑:@调皮连续波,保持关注调皮哥,获得更多雷达学习资料和建议!
一、引言
传统的雷达信号处理手段,只是单纯地利用了普遍的雷达信号处理算法。考虑到实际的工程需求,即使是现在,我们大多数人依旧继承了这种单纯利用,而并没有过多地采取其他诸如机器学习之类的人工智能(AI)高级算法来进行雷达信号分析和处理。
我们要知道,没有过多地采取机器学习算法,并不是意味着它在实际工程中不适用。随着民用雷达的飞速发展,一些机器学习算法是历史注定要被用于雷达信号分析的,因为它能够解决很多复杂的问题,从而满足我们的技术需求。
本文针对诸多读者在【雷达技术交流群】中反复问到“关于雷达信号处理与机器学习”之类的问题,同时借助于其他学者发表的文献,一起来给大家分享一下,希望能够带给大家一些启发。
其实在本文开始之前,我们需要认识到,机器学习与雷达的结合现在已经被许多学者研究过了,其文献可以在网络上找到,不一定仅仅基于本文,本文只是一个概述,希望各位读者能够“自己动手,丰衣足食”。
二、本文主要内容
本文首先会介绍机器学习(ML)的基本概念和简单的实现方法,然后学习在雷达目标分类问题中如何使用监督式学习算法,最后本文给出了一个基于FMCW手势识别的演示案例,以便于读者不光能够了解细微,还能掌握全局。

(图1 雷达发射和接收的组件)
图1为雷达发射和接收的组件,其中接收的回波信号经过AD采样后,送入信号处理器中,在处理器中执行雷达信号处理的相关算法,然后输出检测和测量的结果。需要注意的是,在执行信号处理相关算法时,即可以采用机器学习算法。
三、正文
通常,雷达研究人员会采用P显(PPI)、距离多普勒图(R-D)、距离方位图(R-A)、SAR图像等数据表达方式来体现雷达探测到的目标的信息,如下图所示。

(图2 雷达数据的几种表达方式)
但是,在面对专业的数据分析时,这些表达方式可能需要一个非常熟练的工程师才行,一般人根本就不太明白这些数据到底表达的是什么意思,因为他们没有专业的基础。
因此,我们是否能够让雷达具有“智慧”,让它自己去判断这些数据代表什么意思,然后把最终的检测结果告诉我们呢?
答案是可以的!所谓的机器学习,本质上来讲就是让机器做自主判断,不需要人去观察复杂多变的数据。
1.机器学习算法概述
(1)机器学习
机器学习是一门多领域交叉学科,涉及概率论、统计学、逼近论、凸分析、算法复杂度理论等多门学科。专门研究计算机怎样模拟或实现人类的学习行为,以获取新的知识或技能,重新组织已有的知识结构使之不断改善自身的性能。
机器学习是人工智能核心,是使计算机具有智能的根本途径,即可以从以往的经验中学习某些信息,其检测结果会随着学习经验的提高而提高。我们需要知道,机器学习算法侧重于数据的分析,而不是数据的产生方式,主要存在四个关键问题:
分类、回归、集群、降维
基于上述4点的全部ML算法归纳总结于下面的sklearn库结构图中:
(图3 sklearn库结构图)
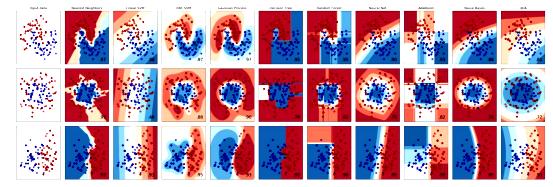
下面以分类为例,进行一个简单的介绍。在下图4的二维训练数据图中,蓝色或者红色的点云代表训练数据,通过三种不同的算法来分类。
(图4 采用不同的ML算法实现分类)
图4中采用的ML算法有NN、Linear SVM、RBF SVM、Decision Tree、Random Forest 等等。下面我们会以支持向量机(SVM)为例,进行介绍。
(2)线性SVM算法
支持向量机的主要任务是在本维度或者更高的维度找到带有标签的训练数据的最宽线性分离。
(图5 SVM原理)
目标数据用 表示,其中, 表示观测的数据, ,表示类别,参数 由一个凸优化问题确定:
(图6 凸优化问题)
使用决策功能对新的数据进行分类: ,SVMs是被认为具有鲁棒性的,并且能够从很小的一组数据中进行学习。
(3)核函数
当超平面无法分离数据时,用一个在更高维度空间的乘积来替换标量乘积 ,例如: ,其中, 。
(图7 高维度空间替换)
这样可以在更高的维度中找到一个分离的超平面,这句话的意思可以这样理解:“如果两类点在二维平面上用一条直线不好分开,那么在三维则用一个曲面,即超平面更容易区分,因为可以多利用一个维度”。
典型的内核是径向基函数内核:
(4)预处理
为了使数据更适合ML方法,通常需要进行预处理。如均值消除、缩放比例、归一化、二进制化等等。
(5)统一的目标自动识别框架(ATR)
统一的目标识别框架包含以下内容:
(a)确定目标集:会观察到的信息?
比如目标的广泛类别(人、兔子、汽车、自行车等等),或者类内区分(老人、成人、儿童等等)。
(b)提取特征集:什么信息是重要的?
最大化类中对象的相似性,同事最大化不同类中对象的差异性。这里需要选择具有明显区分的数据信息,以及对特征量进行权系数调整等操作。
(c)观察特征集:准确地测量。
处理提高信噪比:均值相消、背景消除、脉冲压缩等。
(d)测试特征集:训练并用一个分类器。
监督性学习:每次训练完观察都由操作员给出一个地面真实值;
无监督性学习:训练数据被聚集到类中,然后作为地面真实值去使用;
加强学习:通过反馈从新数据中学习。
好了,本文的核心是雷达与机器学习算法,上面的内容基本已经把机器学习的一些简单概念介绍了一下,下面的内容是结合雷达方面的内容。
2.机器学习的应用
(1)遥感
看几篇文献就了解机器学习是如何应用在遥感方面的:
a.综述论文《Support vector machines in remote sensing :A review》总结了ML算法在遥感领域的诸多应用。
b.《Multispectral classfivition of landsat images : A comparison of support vector machine and neural network classifiers》结果如下所示:
(图8 遥感)
SVM学习的样本数量很少,训练数据由350个样本组成,每个类具有50个像素。用ANN和SVM对地图进行分类的结果如下所示:
(图9 地图分类)
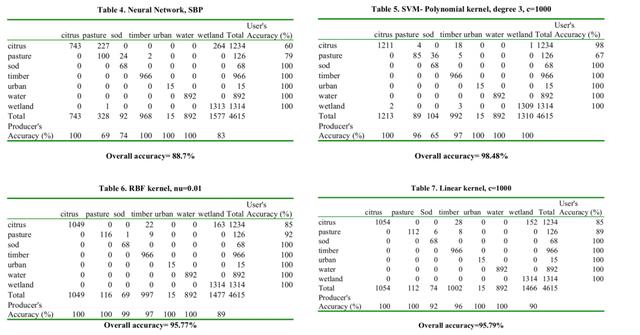
c.《A relative evaluation of multiclass image classification by support vector machines》的结果如下所示:
(图10 图像分类)
上述论文中,在11个频谱波段中进行数据采集,最终只有3个波段用于处理。
(2)目标识别
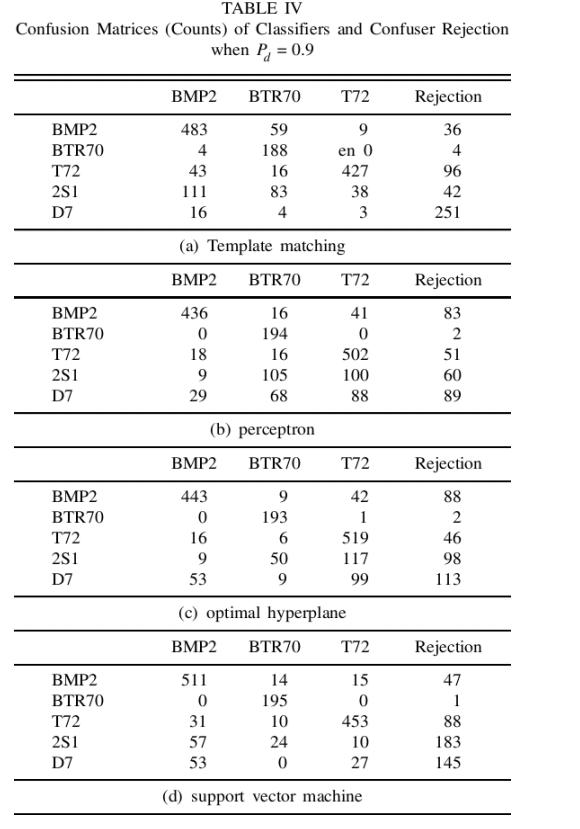
a.综述论文《Automatic target recognition in synthetic aperture radar imagery: A state-of-the-Art review》全面回顾了目标识别技术,不仅仅采用了ML算法,还有很多其他的细节内容。
(图11 目标识别)
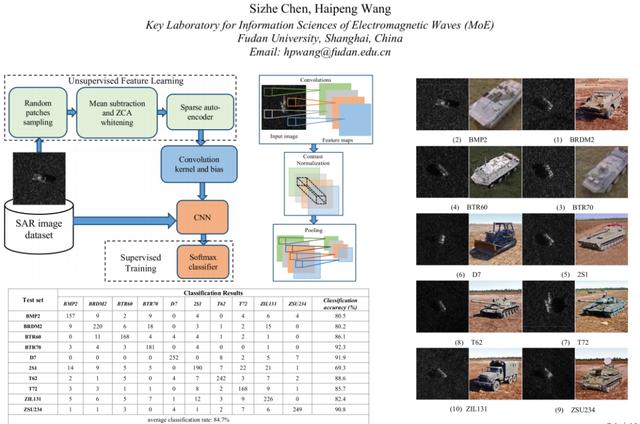
b.《SAR target recognition based on deep learing》的结果如下图所示:
(图12 DL用于SAR)
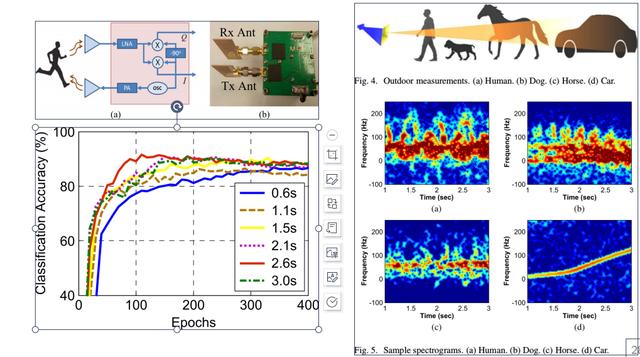
(3)微多普勒分析
面对复杂的动目标,比如一只挥动的手、一匹奔跑的马、飞行的直升机等,会呈现出许多不同的多普勒分量,我们采用提取多普勒频谱作为时间的函数,得到二维的多普勒时-频图 。然后,分析 ,这个操作叫做微多普勒分析,利用ML算法可以识别频谱中的特征,进而对目标进行分类。
下面是论文《Human Activity Classification Based on Micro-Dopper Sigantures Using a Support Vector Machine 》针对人体常见的7个动作二维微多普勒图。
(图13 人体微多普勒分析)
下面是论文《Human Dection and Activity Classification Based on Micro-Dopper Signatures Using Deep Convolutional Netural Networks 》针对人体活动的检测结果:
(图14 人体活动微多普勒分析)
3.FMCW雷达手势识别
2015年,谷歌发布了用于手势识别的60GHz雷达soil,在这里我们采用24G的雷达系统,用来观察相同的功能。
(图15 谷歌soil手势识别雷达)
关于Soil的详细内容,可以观看下面的短视频了解。
1. 硬件系统搭建
采用简单的电子器件组成了一个完整的手势识别雷达硬件平台,并具备手势识别程序。
(图16 24G雷达硬件系统)
FMCW雷达系统的组要结构如下图所示,采用步进频率。
(图17 24G雷达系统结构图)
2. 雷达理论基础
步进频雷达的信号模型如下图所示:
(图18 步进频信号模型)
(1)下变频后,ADC正交采样形成IQ双路信号,因此发射信号s(t)可以表示为:
其中,可以令:
(2)采样 内的up-chirp和down-chirp信号,并对其进行傅里叶变换得到:
——>
(3)将M个信号合并到同一个数据帧中:
只采用这个2MxN的复数的幅值,每帧用其峰值进行归一化。
3.雷达参数设计
载波频率:
带宽:
采样时间:
多普勒频移:
采样接收信号:
相对相移到2π时,满刻度n=N,则有:
距离:
多普勒频移:
因此可以选取N=32,使得距离-多普勒频移达到平衡,相位变化可以大于2π。
驻留时间:
帧周期:M=16个点,采集时间: 。
4.数据处理
每个原始数据帧都经过以下处理:背景消除、去斜处理、FFT、归一化幅度等操作,训练SVM时采用了多帧数据,用于对手势识别和分类。
(图19 手势动作)
5.手势姿态评估
(1)静态:一只手在传感器上方的不同高度,分辨率约为 ;
(2)圆圈:食指在非径向运动时顺时针旋转或逆时针旋转,应该难以分辨;
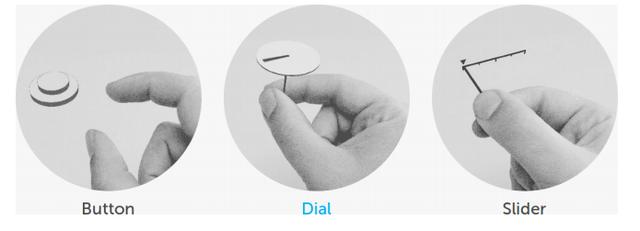
(3)soil手势,如下图所示:
(图20 soil手势)
每个手势都要重复,采集100帧数据为止,然后随机选取30帧数据用于训练,剩余的70帧数据用于测试。不同手势的处理结果如下图所示:
(图21 手势姿态评估结果)
该系统可以区分运动比较明显的多普勒频谱图,具有良好的拇指向上/中/下和静态的区分效果,对非径向运动和微小运动如soil手势性能较差。目前只采用可一个传感器,手势需要与传感器适应,如果采用多个传感器,估计对于手势的要求会降低很多。
四、结论
本文只是简单地介绍了一些ML算法用于雷达信号分析,重点介绍了SVM进行监督的学习算法,另外还介绍了基于SAR图像中每一个像素点的多频谱数据进行地形分类,SAR图像中的目标分类可能需要初始姿态估计,但是公开的数据很少。最后我们介绍了雷达手势识别,手势识别目前是雷达研究领域的一个热点,有望在消费产品中落地,因此大家可以作为一个研究或者课题的方向,争取早日完成论文或者工程项目。
感谢大家阅读!如果本文对你有所帮助,请帮我点个赞和再看。
,