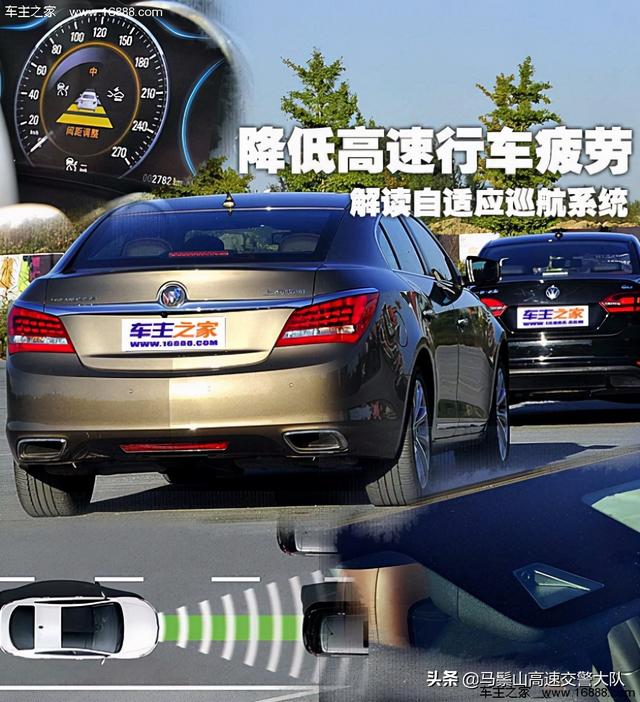
有人说科技是因为懒人的存在而不断发展,对于这句话我不置可否。不过科技的不断进步确实让很多原本很复杂、无趣的事情变得简单、有趣。十几年前的驾驶员听到要开长距离的高速时,多半都会心中一紧,有经验的老司机会开始琢磨穿个合脚的鞋。现在,长途驾驶在自适应巡航的帮助下,已经解放了部分驾驶员的双脚。那么这个能自动达到预设时速并保持预设跟车距离的家伙,是如何做到这一切的?为什么有时候开启自适应巡航进入弯道会突然加速或减速呢?
在解答上面的问题前,首先需要明白自适应巡航的结构是什么样的、它的判断逻辑是什么。明白了结构与原理后,解决实际应用问题会轻而易举。
■ 自适应巡航是什么?它与定速巡航有区别吗?
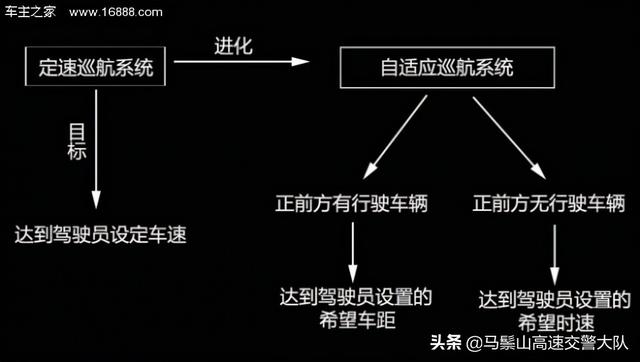
首先要肯定的是自适应巡航与定速巡航是有区别的。科技的发展帮助越来越多的车装配上定速巡航系统,自适应巡航则是基于定速巡航对于速度的控制,进一步实现对于距离的把握。简单讲,定速巡航要做的只有一件事,那就是达到驾驶员预设的时速要求,而自适应巡航除了达到预设时速外,它还肩负着保持预设跟车距离以及随着车距变化自动加速与减速的任务。
■ 自适应巡航的历史
自适应巡航系统的历史可以追溯至上个世纪70年代。1971年,美国EATON(伊顿)公司便已从事这方面的开发。其雏形是日本三菱公司提出的PDC(Preview Distance Control)系统,它将雷达与其他处理器结合在一起,可以侦测出车距变化,并对驾驶员发出警告,系统还可以控制节气门开度调节发动机功率。此后丰田、本田、通用、福特、戴姆勒、博世等公司也投入到了研发行列。
■ 自适应巡航的结构
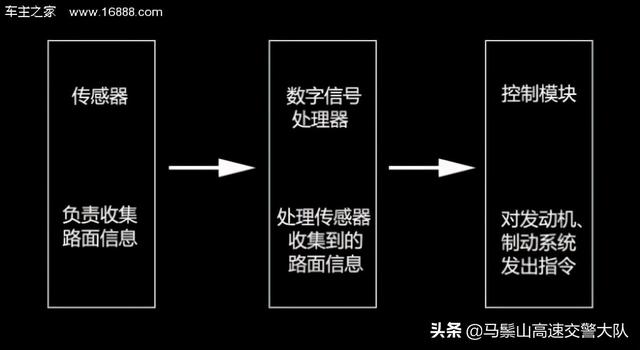
总的来讲,自适应巡航系统由传感器、数字信号处理器以及控制模块三大部分组成。如果用人类做比喻,传感器就类似于眼睛、耳朵、鼻子等器官,它负责感知前车以及本车确切位置,目前市场上常见的传感器有雷达传感器、红外光束以及视频摄像头等几种。信号处理器负责将传感器接收到的信息进行数字处理,最后由控制模块处理收集到的信息进行控制。系统判断需要减速时,最终由ABS系统对车轮实施制动或者变速箱采用降挡的办法,将车速降低。
● 传感器安装位置
目前市面上传感器主要包括雷达传感器、红外光束传感器以及视频摄像头三种。品牌、车型不同其安装位置也不同,常见的安装位置有车标后、保险杠两侧、下方以及车内后视镜背后。造成这些差异的原因主要是各种传感器工作原理不同,当然其中也包含部分成本因素。

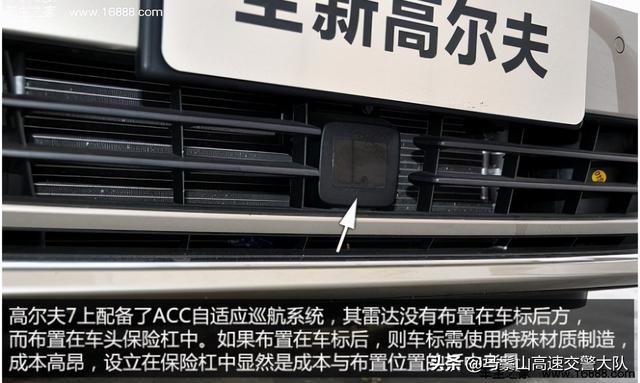


由于每种传感器都有自己的弱点,所以目前自适应巡航系统开发过程中,研发人员便会根据各种传感器的特点,将它们组成搭档,共同为数字信号处理器提供信息。比如雷达对于垂直方向上重叠物体的判断较弱。在实际行车中,当车辆行驶到立交桥附近时,如果前方与盘桥匝道上同时出现车辆,雷达传感器有很低几率出现误判;前方路面出现金属标识牌甚至是金属废弃物时,雷达传感器也有很低几率产生误判。相信没人想拿自己的生命做赌注,于是为了进一步降低误判的可能,越来越多的自适应巡航系统采用两种传感器收集信息。


难道这些传感器除了搭档合作为数字信号器提供信息外,就没有其他解决办法了?当然不是。比如单一摄像头受到硬件限制较大,对于距离判断能力较弱,那两个摄像头对距离判断效果又如何呢?在刚刚结束的东京车展上,搭载双摄像头传感器的车型出现在了斯巴鲁展台上,相信工程人员已经能让它满足实际使用需求。


■ 自适应巡航系统控制逻辑
本车时速、前车时速、前车与本车距离、旁边车道是否有车辆进入等等,这些都是自适应巡航这套系统的控制依据。简单讲,这套系统的控制逻辑就是利用传感器得到行车所用的一切信息,当发现前车减速或发现干扰本车行驶的新目标时,电控单元发送执行信号给发动机或制动系统,做出相关动作。如果发现前方没有车辆,则恢复设定车速,随后就是周而复始循环至您关闭功能。
这些内容只是控制逻辑中很少的一部分,现在越来越多配备自适应巡航的车辆可以控制跟车距离远近,那设置好的跟车距离是否会随着车速改变而变化?当后车的传感器无法识别前车时会发生什么?这些问题都是自适应巡航系统控制逻辑需要面对的问题,下一页的测试项目中,我们就以人肉体验的方式实践上述常会碰到的问题。