上接前篇,讲讲小P最喜欢的机械结构:托森差速器。
按照分类,托森差速器属于差速器中的限滑差速器的一类。托森的英文名叫“Torsen”,取自“Torque Sensing”,意思就是“扭矩感应”。说明托森的特点是能够依赖巧妙的机械设计,自动快速的实现扭矩分配。
托森是美国人Vernon Gleasman于1958年发明的。现在的托森归属于日本捷太格特北美公司。
托森差速器历经多年的发展,目前主要有三款产品,分布是A、B、C型。广泛用于各种豪华车性能车,尤其是以奥迪为代表的Quattro四驱系统中的中央差速器。(后来奥迪为了不受限于外公司,自己开发了冠状齿式中央差速器,可以看小P之前的文章奥迪的灵魂——详解奥迪Quattro四驱技术)。废话少说,来看看这三款差速器的结构吧!
托森差速器A型这是最经典的托森差速器,屡次出现在各种汽车构造的书籍当中。本文也将其作为重点来讲解。
图1 奥迪Quattro系统中的A型托森差速器
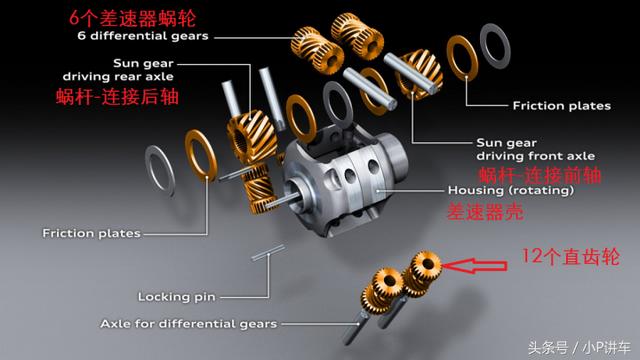
图2 托森A型爆炸图
A型差速器应用了大量的蜗轮蜗杆的结构,一个托森A型差速器有2个蜗杆,分别连接前轴、后轴(如果是用在轴间差速,则连接左轴、右轴),6个蜗轮,每个蜗轮带2个直齿轮,共12个直齿轮。
托森A型差速器的工作原理,关键在于以下两点:
- 蜗轮蜗杆逆传递效率极低,即蜗轮蜗杆能够实现传动自锁
- 蜗轮蜗杆齿面间由于高摩擦产生力矩,实现差速器的锁死
A型托森差速器的工作过程
图3 官方结构图
如图3,假设车辆左轮由于某种原因陷入泥潭,而右轮附着条件很好。那么左轮将有空转的趋势。此时,左轴蜗杆的转速大于右轴蜗杆的转速。左轴蜗杆将使左端蜗轮转动,左端蜗轮上的直齿圆柱齿轮随之转动,带动与其啮合的右端直齿圆柱齿轮转动,右端直齿圆柱齿轮带动与其同轴的右端蜗轮转动,右端蜗轮将带动右端蜗杆转动。蜗轮带动蜗杆的逆传递效率取决于蜗杆的螺旋角及齿面的摩擦系数,其效率是极其低的。对于一定的差速器结构,其螺旋角是一定的。当左右两轴的差速过大时,蜗轮与蜗杆间的摩擦力会很大,蜗轮将无法带动蜗杆,那么就产生自锁。那么右轴会分配到较大的驱动力矩,而右轮的附着条件较好,车辆即可脱困。
如果不好理解,直接看下面的动画,显示了不同条件下托森差速器的工作状态:
图4 左右等速
如图4,现实的是车辆正常直线行驶的时候,左右车轮的转速相等,此时差速器中的蜗轮蜗杆和其啮合的直齿圆柱齿轮都不工作。
图5 左右车轮不等速——转速差小的情况
如图5,显示的是左右车轮不等速的时候,可以观察蜗轮蜗杆及直齿轮的工作状态。就完全理解了托森A型差速器的运动原理。
图6 极端状态——右轮不动
图6显示了一种极端状态,右轮不动,即转速差很大的情况。这种情况下,运动规律跟图5是一致的,不同的是,这种时候,扭矩绝大部分传递给右轮。(时刻铭记:托森差速器的扭矩分配与转速差成正相关)
官方给出的A型托森差速器的扭矩分配比可达2.5:1到5.0比1,根蜗轮蜗杆螺旋角等具体参数有关,可以根据车型实际情况选择不同的产品。
总结
托森B型差速器
- 托森差速器是一种利用纯机械实现限滑和自锁的差速器,具有响应快、可靠性高等特点
- 托森差速器无法实现100:0的扭矩分配(一般依靠离合实现差速的差速器才能实现完全解耦,如多片离合器式差速器)
- 托森A型差速器的理论基础是蜗轮蜗杆逆传递效率极低
- 托森A型差速器的扭矩分配与速度差成正相关,速度差越大,分配给低转速端的力矩越大
讲了这么多,来看看托森B型差速器吧!
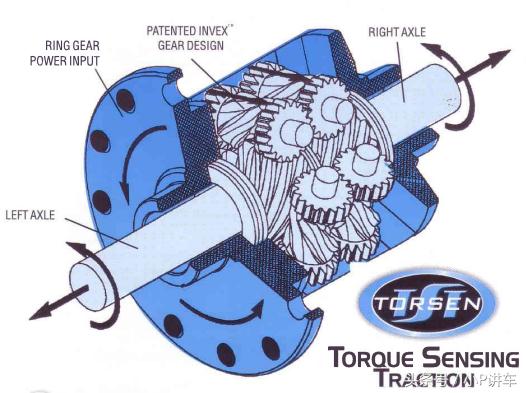
图7 托森B型差速器
图8 B型官方文档
依然是很巧妙的各种齿轮结构。与A类不同的是,将A类垂直方向传动的蜗轮蜗杆结构变为了平行方向的螺旋齿轮传动。具体原理小P就不详细讲述了,说下B型的优势吧!
托森C型差速器
- 应用更广,可作为前后轴的轮间差速器,也可作为中央差速器(A型一般用于后轴或中央差速器)
- 更好的噪音、NVH性能
托森C型差速器结构如下:
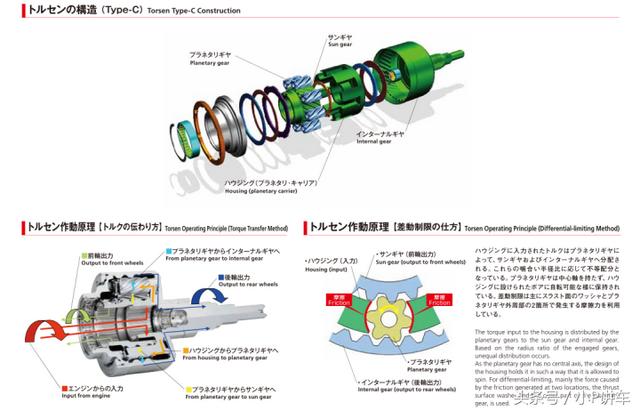
图9 托森C型差速器
如图,最明显的变化是,C型差速器应用了行星轮机构。
图10 C型官方文档
C型托森差速器的优势有:
- 专门针对中央差速器开发的产品
- 利用行星轮机构,结构更加紧凑、轻量化
- 更好的转向稳定性(下图11)
图11 C型托森差速器对转向稳定性的帮助
,