(报告出品方/作者:广发证券,闫俊刚、张乐、邓崇静、李爽)
一、智能驾驶功能和感知硬件配置勾稽关系梳理当下的智能驾驶水平众说纷纭,各家车企对智能驾驶的定义标准也并不统一, 因此我们认为有必要梳理清楚智能驾驶的功能和其相应的所需要的硬件配置。本文 希望通过对智能驾驶行车场景和泊车场景下的功能进阶关系分别进行梳理,以相对 统一的功能名称阐明不同智能驾驶级别下的功能含义,以及各功能对应的典型硬件 配置。
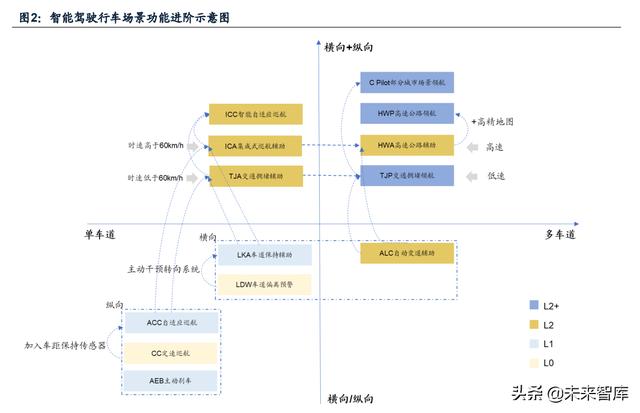
(一)智能驾驶行车场景功能主要硬件配置:车载摄像头和毫米波雷达
按照SAE对自动驾驶的分级标准,目前落地的智能驾驶行车场景功能可以分为 L0、L1、L2、L3(考虑到法规约束及迭代进程,本报告中暂定义为L2 )四个级别。
L0级别的主要功能包括定速巡航(CC),车道偏离预警(LDW);
L1级别的主要功能包括主动刹车(AEB)、车道保持辅助(LKA)、自适应巡航 (ACC);
L2级别的主要功能包括交通拥堵辅助(TJA)、集成式巡航辅助(ICA)、智能自 适应巡航(ICC)、自动变道辅助(ALC)、高速公路辅助(HWA);
L3(考虑到法规约束及迭代进程,本报告中暂定义为L2 )级别的主要功能包括高 速公路领航(HWP)、交通拥堵领航(TJP)、部分城市场景领航(C Pilot)。
智能驾驶形成场景各功能定义及所需典型硬件配置:
L0级别智能驾驶功能:
定速巡航(CC):开启后可自动保持车速,使车辆按照设定的速度行驶,可实现 对车辆纵向方向的控制。
车道偏离预警(LDW):实时监测车辆在本车道的行驶状态,并在出现或即将出 现非驾驶意愿的车道偏离时发出警告信息。通常使用1V的配置方案,典型配置为一 个前视摄像头。可实现对车辆横向方向的控制。
L1级别智能驾驶功能:
主动刹车(AEB):实时监测车辆前方行驶环境,并在可能发生碰撞危险时自动 启动车辆制动系统使车辆减速,以避碰撞或减轻碰撞后果。通常使用1V或者1R的配 置方案,典型配置为一个前视摄像头或一个前向毫米波雷达。
车道保持辅助(LKA):实时监测车辆与车道边线的相对位置,持续或在必要情 况下控制车辆横向运动,使车辆保持在原车道内行驶。通常使用1V的配置方案,典 型配置为一个前视摄像头,可实现对车辆横向方向的控制。
自适应巡航(ACC):实时监测车辆前方行驶环境,在设定的速度范围内自动调 整行驶速度。通常使用1V或者1R的配置方案,典型配置为一个前视摄像头或一个前 向毫米波雷达。适用于60km/h以上的速域,可实现对车辆纵向方向的控制。
L2级别智能驾驶功能:
交通拥堵辅助(TJA):在车辆低速通过交通拥堵路段时,实时监测车辆前方及 相邻车道行驶环境,经驾驶员确认后自动对车辆进行横向和纵向控制。通常使用 1V1R的配置方案,典型配置为前视摄像头 前向毫米波雷达。适用于60km/h以下的 速域,可实现对车辆横向和纵向方向的控制。是低速ACC和LKA功能的集成。
集成式巡航辅助(ICA):在车辆高速行驶时,实时监测车辆前方及相邻车道行 驶环境,经驾驶员确认后自动对车辆进行横向和纵向控制。通常使用1V1R的配置方 案,典型配置为前视摄像头 前向毫米波雷达。适用于60km/h以上的速域,可实现对 车辆横向和纵向方向的控制,是高速ACC和LKA功能的集成 。
智能自适应巡航(ICC):实时监测车辆前方行驶环境,在设定的速度范围内自 动调整行驶速度并具有减速至停止及从停止状态自动起步的功能,同时保持车辆在 原车道内行驶。通常使用1V1R的配置方案,典型配置为前视摄像头 前向毫米波雷 达。适用于全速域,可实现横向和纵向的控制,是TJA和ICA功能的集成。
自动变道辅助(ALC):在通畅的封闭高速公路或城市快速路上,可以按照驾驶 员的变道指令,辅助驾驶员进行车道变换。通常使用1V5R的配置方案,典型配置为 前视摄像头 前向毫米波雷达 4个角雷达。适用于60km/h以上的速域。
高速公路辅助(HWA):在高速公路上为驾驶员提供车辆的纵向和横向辅助,工 作场景为高速公路主干道(不含匝道)。当满足变道条件且经驾驶员确认后,系统进 行路径规划并自主完成车道变换动作。系统监控到脱手条件满足时可允许驾驶员一 段时间内脱手驾驶。通常使用1V5R的配置方案,典型配置为前视摄像头 前向毫米 波雷达 4个角雷达。适用于60km/h以上的速域,是ACC、LKA和ALC功能的集成。
L2 智能驾驶功能:
高速公路领航(HWP):在高速公路辅助(HWA)的基础上实现了自动上下匝 道功能。适用场景通常为高速公路或城市快速路等结构化道路。通常使用3V5R的配 置方案,典型配置为3目前视摄像头 前向毫米波雷达 4个角雷达。适用于60km/h以 上的速域,是ACC、LKA、ALC和高精地图功能的集成。

交通拥堵领航(TJP):在交通拥堵辅助(TJA)的基础上实现了低速场景下的 自动变道辅助(ALC),并加入高精度地图预测可行驶走廊。适用场景通常为拥堵的 高速公路或城市快速路等结构化道路。通常使用3V5R的配置方案,典型配置为3目 前视摄像头 前向毫米波雷达 4个角雷达。适用于60km/h以下的速域,可实现横向 和纵向的控制,是ACC、LKA、ALC和高精地图功能的集成。
部分城市场景领航(C Pilot):在部分城市道路按照导航路径智能辅助驾驶,引 导车辆抵达目的地。适用场景通常为城市内的非结构化道路。通常使用9V5R的配置 方案,典型配置为3目前视摄像头 4个侧视摄像头 后视摄像头 监测摄像头 前向毫 米波雷达 4个角雷达。可实现横向和纵向的控制,是ACC、LKA、ALC和高精地图 功能的集成。
注:典型配置中V指摄像头,R指毫米波雷达,统计时只计入与行车场景功能相 关的摄像头和毫米波雷达数量,与泊车场景功能相关的传感器未计入。
(二)智能驾驶泊车场景功能主要硬件配置:车载摄像头和超声波雷达
按照SAE对自动驾驶的分级标准,智能驾驶泊车场景功能可以分为L2、L3(考虑 到法规约束及迭代进程,本报告中暂定义为L2 )、L4三个级别。
其中L2级别的主要功能包括全自动泊车(APA)、遥控泊车(RPA);L3级别(考 虑到法规约束及迭代进程,本报告中暂定义为L2 )的主要功能包括记忆泊车(VPA); L4级别主要功能包括代客泊车(AVP)。(报告来源:未来智库)
全自动泊车(APA):在汽车低速巡航时,使用超声波雷达感知周围环境,帮助 驾驶员找到尺寸合适的空车位,并在驾驶员发送泊车指令后,将汽车泊入车位。
全自动泊车功能通常使用12UR的配置方案,典型配置为4个APA超声波雷达 8 个UPA超声波雷达。适用于驾驶员在车内,库位为垂直库位或平行库位的场景。
遥控泊车(RPA):在汽车低速巡航并找到空车位后,用户先在车内开启遥控泊 车系统,搜索并确认目标车位,再挂入P挡,拉起EPB后下车,在车外使用遥控装置 发出泊入指令,遥控泊车系统控制车辆完成泊入。遥控泊入一般可支持平行车位、 垂直车位和倾斜车位。
遥控泊车功能通常使用12UR 车载蓝牙的配置方案,典型配置为4个APA超声波 雷达 8个UPA超声波雷达。适用于驾驶员在车内或车外5米内,库位为狭窄停车位的 场景。
记忆泊车(VPA):驾驶员在准备停车前,可以在库位不远处,开启“路线学习” 功能,随后慢慢将汽车泊入固定车位,系统就会记忆该段行驶和泊车路线。完成路 线的学习后,在录制时的相同起点下车,用手机蓝牙连接汽车,启动自学习泊车辅 助系统,汽车即可模仿先前录制的泊车路线,完成自动泊车。
记忆泊车功能通常使用4V12UR 车载蓝牙配置方案,典型配置为4个环视摄像 头 4个APA超声波雷达 8个UPA超声波雷达。适用于驾驶员在车50米内,库位为小 区/公司固定车位场景。
代客泊车(AVP):驾驶员在停车场入口处即可下车,车辆自动完成进入停车场, 寻找空车位,自动泊入的全过程,并且在驾驶员发出指令后可自动驶出停车场。
代客泊车功能通常使用5V12UR 车载蓝牙的配置方案,典型配置为1个前视摄 像头 4个环视摄像头 4个APA超声波雷达 8个UPA超声波雷达。适用于驾驶员在车 外500米内,库位为地上/地下公共停车场的场景。
注:典型配置中V指摄像头,UR指超声波雷达,统计时计入与泊车场景功能相 关的摄像头和毫米波雷达数量,与行车场景功能相关的传感器未计入。

(一)中国品牌已上市且交付车型智驾水平对比:小鹏和广汽暂时领先
我们选取各主机厂目前已披露公开信息的(截至22年4月)、智驾水平最高的车型 进行对比:
从其预埋的硬件支持的功能上限来看,理想L9、蔚来ET7、小鹏P5、极氪001和 广汽AION LX PLUS并驾齐驱;
从已向用户开放的智能驾驶功能进度来看,小鹏P5和广汽AION LX PLUS智驾 水平最高,已实现L2 级别主要功能的基本覆盖。
新势力车企中,小鹏P5在智驾功能开放进程上处于领先位置,蔚来和理想除记 忆泊车功能(VPA)外,其余智驾功能和小鹏并驾齐驱。
传统车企/品牌中,我们跟踪的6家车企均已实现L2级别智驾功能的开放落地。 同时从硬件支持的智驾功能上限来看,广汽、极氪、上汽和长城目前处于相对领先 的位置。

(二)理想:地平线 英伟达芯片双加持,C Pilot 功能或将于 22 年落地
L2:2019年4月上市的理想ONE通过OTA逐步实现L2功能,使用Moblieye解决 方案
2019款理想ONE搭载Moblieye EyeQ4(2.5Tops)芯片,采用Moblieye解决方 案,可实现全自动泊车(APA)、集成式巡航辅助(ICA)、自动变道辅助(ALC)、交 通拥堵辅助(TJA)和高速公路辅助(HWA)等L2级别智能辅助驾驶功能。
L2 :2021年12月理想OTA 3.0发布,新增自动辅助导航驾驶功能(NOA)
2021年5月理想One 2021款上市,2021年12月在对其OTA 3.0的升级中,使用 地平线征程3芯片,搭载自研的AD智能辅助驾驶系统,新增的智能辅助驾驶功能可 以实现L2 级别的高速公路领航(HWP)和交通拥堵领航(TJP)功能。
根据公司年报,预计于2022年Q2上市的理想L9高配版将采用英伟达Orin (254TOPS)芯片,可以实现L2 级别的部分场景城市领航(C Pilot)等功能。

(三)蔚来:L2 智驾功能已落地,软件算法自研加速
L2:2017年12月上市的蔚来ES8通过OTA逐步实现L2功能,使用Moblieye解 决方案
蔚来ES8搭载Moblieye EyeQ4(2.5Tops)芯片,采用Moblieye解决方案。2019 年6月通过OTA升级到NIO OS 2.0.0版本后可实现全自动泊车(APA)、交通拥堵辅 助(TJA)和高速公路辅助(HWA)等功能,实现了L2级别的智能辅助驾驶功能落 地应用。
L2 :2020年10月, NIO OS升级到2.7.0版本,新增自动辅助导航驾驶功能 (NOP)
2020年10月,NIO OS 2.7.0新增的自动辅助驾驶功能可以实现L2 级别的高速 公路领航(HWP)和交通拥堵领航(TJP)功能(NIO OS 2.9.0对上述功能进行了优 化)。
2022年3月交付的ET7采用英伟达Orin(254TOPS)芯片,搭载蔚来自研的NAD 智能辅助驾驶系统,后续或将通过OTA逐步开放L2 级别的记忆泊车(VPA)和部分 场景城市领航(C Pilot)等功能。

(四)小鹏:中国品牌中率先实现 L2 智驾功能落地,智驾软件算法自研 最早
L2:2018年12月上市的小鹏G3首次实现L2级功能,使用Moblieye解决方案
小鹏的智能驾驶发展始于其第一款量产车小鹏G3。小鹏G3搭载Moblieye EyeQ4(2.5Tops)芯片,采用Moblieye解决方案,可实现自动紧急制动(AEB)、自 适应巡航(ACC)和车道保持辅助(LKA)等功能,通过OTA升级到Xpilot2.5后,小 鹏G3新增自动变道辅助(ALC)、交通拥堵辅助(TJA)功能,实现了L2级别的智能 辅助驾驶功能落地应用。
L2 :2020年4月上市的小鹏P7实现部分L2 功能,开启算法自研时代
从2020年4月小鹏P7上市开始,小鹏进入智能辅助驾驶算法自研阶段。小鹏P7 采用英伟达Xavier(30Tops)芯片,搭载Xpilot3.0系统,可以实现高速公路领航(HWP)、 交通拥堵领航(TJP)、记忆泊车(VPA)等L2 级别的智能辅助驾驶功能。
2021年9月上市的小鹏P5(搭载Xpilot3.5坂本)通过后续OTA升级后,或将成为 中国品牌首款具备部分场景城市领航(C Pilot)功能的汽车。
根据公司官网,小鹏G9预计于2022年6月上市,采用英伟达Orin(254Tops)芯 片,搭载Xpilot4.0,或将实现全场景城市领航功能。

(五)比亚迪:22 年 4 月上市的汉 DMi 实现部分 L2 功能落地
L2:2020年7月上市的汉EV 2020款可实现部分L2功能
汉EV 2020款于20年7月上市,搭载DiPilot系统,可实现交通拥堵辅助(TJA)、 集成式巡航辅助(ICA)、全自动泊车(APA)等L2级别智能辅助驾驶功能。 汉DMi于2022年4月上市,新增可实现HWA高速公路辅助功能。
(六)长城:牵手高通 毫末智行自研 华为合作,多路径布局
L2:2020年8月上市的魏派VV7 科技版实现部分L2功能
根据公司官网,20年8月上市的魏派VV7 科技版可实现交通拥堵辅助(TJA)等 L2级别智能辅助驾驶功能。
L2 :魏派摩卡21年11月通过FOTA升级,实现高速NOH量产
根据公司官网,2021年5月上市的魏派摩卡全系搭载毫末智行HPilot 1.0 辅助驾 驶系统,使用Moblieye EyeQ4(2.5Tops)芯片,可实现集成式巡航辅助(ICA)、自 动变道辅助(ALC)和高速公路辅助(HWA)等L2级别智能辅助驾驶功能。2021年11 月摩卡通过FOTA升级,实现高速NOH量产。 根据毫末智行官网,2022年3月上市的坦克500搭载毫末智行HPilot 2.0 辅助驾 驶系统,加入了“行泊一体”行车与泊车智能场景一体解决方案。
22年H1:小魔盒3.0产品将采用高通(360TOPS)芯片,系统升级至Hpilot3.0, 预计可实现部分场景城市领航(C Pilot)功能。 2022年H2:长城将在系统升级至Hpilot3.5后,实现全场景的的城市领航功能。 2023年:计划推出毫末自动驾驶HSD(HAOMO Self-Driving)。
此外,预计将在2022年内交付的机甲龙将采用华为芯片,沙龙的自动驾驶系统 采用双华为MDC610,传感器为4个激光雷达 7个800万摄像头,在实现L2 功能的 基础上,实现全域基于导航的辅助驾驶,泊车领域预计可实现记忆泊车功能。

(七)极氪:硬件预埋 软件迭代,L2 功能落地可期
L2:2021年11月上市的极氪001实现部分L2功能落地
极氪001搭载ZAD系统,搭载两枚Moblieye EyeQ5H(24TOPS)芯片,使用 Mobieye SuperVison解决方案。 截至2022年3月底,极氪001通过OTA升级到ZEEKR OS 2.0 Beta可实现交通拥 堵辅助(TJA)和集成式巡航辅助(ICA)等功能,后续通过OTA可逐步开放实现高 速公路辅助(HWA)、自动变道辅助(ALC)等功能。(报告来源:未来智库)
L2 :极氪001后续OTA升级后将可实现部分L2 功能
选装ZAD完全自动辅助驾驶系统的极氪001,后续通过OTA升级预计可实现高速 公路领航(HWP)、交通拥堵领航(TJP)、部分场景城市领航(C Pilot)等L2 级别智 能辅助驾驶功能。

(八)吉利:星越 L 落地 L2 功能,智驾升级稳步推进
L2:2021年7月上市的星越L可实现大部分L2功能
几何C搭载G Pilot智能驾驶辅助系统,可实现全自动泊车(APA)、集成式巡航 辅助(ICA)等L2级别智能辅助驾驶功能。2021年7月上市的星越L可实现自动变道 辅助(ALC)、高速公路辅助(HWA)等L2级别智能辅助驾驶功能。
(九)长安:牵手地平线,已实现 L2 功能落地
L2:2021年2月上市的UNI-T可实现部分L2功能,搭载地平线征程2芯片
UNI-T搭载地平线征程2(4TOPS)芯片,可实现全自动泊车(APA)、集成式巡航 辅助(ICA)、交通拥堵辅助(TJA)等L2级别智能辅助驾驶功能。 2022年3月上市的UNI-V搭载NAD1.0智能驾驶辅助系统,采用地平线征程 2(4TOPS)芯片,可实现自动变道辅助(ALC)、高速公路辅助(HWA)等L2功能。

(十)广汽:L2 功能已落地,智驾系统迭代加速
L2:2019年4月上市的AION S可实现部分L2功能,搭载ADiGO 2.0系统
AION S搭载ADiGO 2.0系统,可实现全自动泊车(APA)、集成式巡航辅助(ICA)、 交通拥堵辅助(TJA)等L2级别智能辅助驾驶功能。 2020年4月上市的AION LX搭载ADiGO 2.5智能驾驶辅助系统,采用Moblieye EyeQ4(2.5Tops)芯片和安波福智能驾驶解决方案,可实现自动变道辅助(ALC)。 2021年3月上市的AION V搭载ADiGO 3.0智能驾驶辅助系统,采用Moblieye EyeQ4(2.5Tops)芯片和博世智能驾驶解决方案,可实现高速公路辅助(HWA)功能。
L2 :2021年9月上市的AION V PLUS可实现记忆泊车(VPA),2022年1月上市 的AION LX PLUS实现TJP、HWP功能落地
2021年9月上市的AION V PLUS搭载ADiGO 3.0智能驾驶辅助系统,采用 Moblieye EyeQ4(2.5Tops)芯片和博世智能驾驶解决方案,可实现记忆泊车(VPA) 功能。 2022年1月上市的AION LX PLUS搭载ADiGO 4.0系统,采用自研软件算法,可 实现L2 级别的交通拥堵领航(TJP)、高速公路领航(HWP)功能。

(十一)上汽:智己 L7 助力 L2 功能落地可期
L2:2018年8月上市的MARVEL X可实现部分L2功能
MARVEL X搭载Ai Pilot智能驾驶辅助系统,采用Moblieye EyeQ4(2.5TOPS) 芯片和Moblieye智能驾驶解决方案,可实现全自动泊车(APA)、集成式巡航辅助 (ICA)、交通拥堵辅助(TJA)等L2级别智能辅助驾驶功能。 2021年2月上市的MARVEL R搭载R Pilot智能驾驶辅助系统,采用Moblieye EyeQ4(2.5Tops)芯片和Moblieye智能驾驶解决方案,可实现自动变道辅助(ALC)、 高速公路辅助(HWA)功能。
L2 :2022年4月上市的智己L7可实现部分L2 功能,搭载英伟达Orin芯片
智己L7搭载IM AD智能驾驶辅助系统,量产版本采用英伟达Orin(254TOPS) 芯片和自研智能驾驶解决方案,可实现交通拥堵领航(TJP)、高速公路领航(HWP) 和部分场景城市领航(C Pilot)等L2 功能。

(本文仅供参考,不代表我们的任何投资建议。如需使用相关信息,请参阅报告原文。)
精选报告来源:【未来智库】。未来智库 - 官方网站
,




