基于局部控制的单元几何结构及其全局配置成结构和机制,机械超材料可提供奇异的特性。之前的研究中,这些被制成连续的、单片结构的增材制造,提供高分辨率和高吞吐量,但本质上受到工艺和机器的限制。
为了解决这个问题,近日,来自美国麻省理工学院的BenjaminJenett等研究者,提出了一个基于有限部分离散装配的机械超材料构造系统,这些部分可以在空间上组成一系列的特性,如刚性、柔度、手性和增大行为。相关论文以题为“Discretely assembled mechanical metamaterials”发表在Science Advances上。同期该论文登上了《Science Advances》的封面。
论文链接:
https://advances.sciencemag.org/content/6/47/eabc9943

从微观到宏观的合理设计材料一直是一个有着广泛工程应用的长期目标。通过控制局部单元特性及其全局空间分布和排列,可以获得具有奇异行为的超材料。机械超材料的基础来自于单元固体的研究,其中天然材料,如木材和骨头,或合成材料,如随机泡沫,被理解为一个闭合或开放细胞网络。在后一种情况下,边缘形成了梁的网络,根据梁与基材的连通性,可以解析地预测梁的宏观行为。
数字制造的进步,特别是增材制造,使这些复杂的设计得以实现。开创性的工作证明了刚性,超轻晶格材料,并已被改进,导致机械超材料在超轻密度与多尺度层次上具有优异的刚度和强度。纳米尺度特征的好处,在于进一步扩展了奇异的性能参数空间,具有闭胞板的结构显示出接近弹性材料性能的理论极限的潜力。
任何给定进程可以打印的最大结构,通常受到机器的构建量的限制。因此,大量的工作都集中在扩充机器上。米级FDM平台和更大的胶凝沉积机已经被证明,并提出了协调移动机器人来实现任意大的工作区域。然而,在精度、规模和成本之间存在权衡。制造大型精密机器是昂贵的,而且由于机器性能、尺寸和成本的内在耦合,要实现高质量、低成本的大尺度(> 1米)机械超材料存在重大挑战。
制造机械超材料的另一种方法是寻求将这些方面解耦,并以此克服基于机械的限制。这种方法基于离散的、模块化的组件的可逆组装,利用机械连接从较小的、可批量生产的部件中构建出更大的、功能性的超材料和结构。这种方法的第一次演示使用了定制的缠绕、厘米级、碳纤维增强聚合物(CFRP)组件,由于采用了高模量的组成材料,使得超轻密度网格比最先进的金属微网格具有更好的弹性刚度性能。
在此,研究者基于有限集的模块化,大批量生产的零件的离散装配,提出了一个机械超材料的构造系统。研究者通过实验证明了每种零件类型所需的超材料特性,并结合数值模拟结果,展示了其他意想不到的有用特性。该系统通过部件的设计来实现预期的连续体属性,这样全局行为就由局部机制来控制。研究者详细描述了设计方法、生产过程、数值模拟和超材料行为的实验表征。这种方法得益于增量装配,增量装配消除了规模限制、可靠、低成本部件生产的最佳实践制造,以及通过跨部件类型的一致装配过程实现的可互换性。

图1 离散力学超材料子系统的描述和表征。
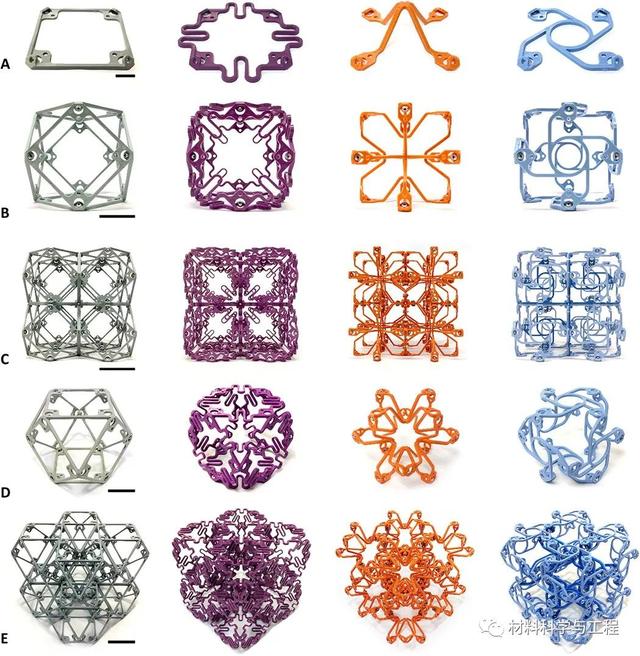
图2 四种不同组装的机械超材料。

图3 刚性机械超材料。

图4 机械材料兼容。

图5 增大的机械材料。

图6 手性机械超材料。
综上所述,研究者提出了一种生产大规模机械超材料的方法,通过离散模块化的组装,大批量生产的零件。研究者展示了一组有限的部件类型,它们展示了一系列不同的行为。刚性格点类型在可预测的失效模式下显示出线性刚度-密度比例。顺从型格点表现出二次的硬密度比例,以及在低单元数时的独特体积行为,例如,接近零的泊松比。增大晶格类型表现出可控的、各向同性的负泊松比。手性晶格类型对轴向应变表现出可伸缩的横向扭曲,这是用于防止建筑内部受挫的两种类型的结果。四种类型均与数值结果吻合较好,且通过分析手段可预测其行为。
结合分层设计工具和装配自动化,这项研究将使软机器人、响应式航空和水动力结构以及用户定义的可编程材料等新兴领域成为可能,从而进一步融合未来工程系统的数字和物理方面。(文:水生)
本文来自微信公众号“材料科学与工程”。欢迎转载请联系,未经许可谢绝转载至其他网站。
,




