电路为了实现主要的机械臂运动控制功能其实核心就4块板子:
- REF核心板
- REF底板也就是机械臂底座里面的控制器电路板
- 步进电机驱动
- Peak示教器
其中前两者和Peak我都开源了,步进驱动设计的时候参考了: https://github.com/unlir/XDrive 这个项目,这是我一个朋友开源的闭环驱动,基于STM32。该驱动分为开源版和闭源版,闭源版基于分立MOSFET性能极其强劲且功能很完善,开源版用的ADC 斩波驱动芯片,具备基础功能,不带CAN协议。需要的话大家可以自行研究,(另外他家有淘宝店可以直接买闭源成品,非常推荐)。
当然另一种方式是大家也可以自行使用GRBL类的驱动器改装用来驱动本机械臂,这样方案的问题在于,grbl固件耦合性比较强(毕竟不是针对机械臂而是CNC类应用设计的)不便于扩展,另外脉冲形式的控制方式使得走线极其不优雅(每一个关节都要单独拉step/dir线到控制器,导致最后几个关节走线很长)。
而我用一体闭环的方式则可以以串联的形式把所有电机连起来即可,走CAN总线使得整体走线只需要四根线(电源正负两根,CAN信号线两根),此外总线模型使得电机可以工作在力矩、速度、位置、轨迹模式下,而脉冲模式只能工作在位置和轨迹模式,无法进行复杂控制。
Peak的话我已经软硬件都开源了,可以去SubModules文件夹里面看那边的README说明。
关于固件
这个机械臂的固件核心就是运动学姿态解算,这块我还在整理,后面会封装得更完善一些进行开源,已开源,现在写死的很多参数会设计成可配置的,方便大家用本项目学习完后迁移到自己设计的机械臂中。
REF的固件使用说明:
固件主要包括几大功能模块:
- BSP驱动:板载的各种硬件驱动比如OLED、IMU、LED、蜂鸣器、非易失储存等等
- 3rdParty库:包括U8G2的图形库和Fibre的序列化/反序列化库
- Core:ST官方的HAL库
- Driver:ARM的CMSIS驱动
- Midwares:FreeRTOS支持包
- Robot:核心机器人库,包括各种算法和驱动代码
- UserApp:上层应用,可以基于我提供的API接口自行开发其他应用
其中OLED使用Arduino的U8G2库移植而来,可以方便地现实各种调试和系统信息,另外由于STM32的硬件I2C又BUG这里使用了软件I2C驱动屏幕,实测帧率比硬件I2C更高。
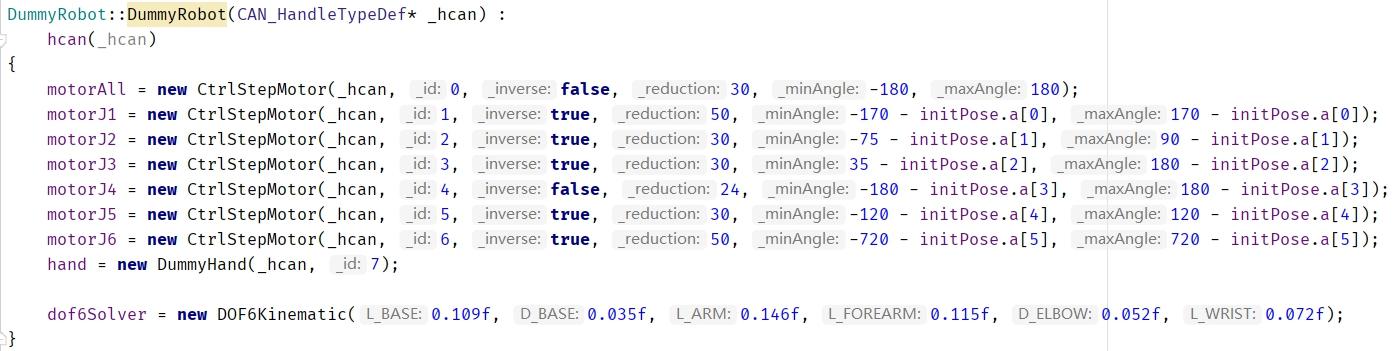
DummyRobot类是Dummy的完整定义所在,初始化的时候需要设置好步进电机驱动的信息以及自身的DH参数:
其中驱动器信息包含:CAN节点ID、是否反向、减速器的减速比、运动限制范围。
而DH参数的含义如下:
机械臂的构型需要满足Pieper判据(机器人的三个相邻关节轴交于一点或三轴线平行),才能得出解析解,所以大家可以根据Dummy的结构进行修改,然后自己替换DH参数即可以移植我的代码。
关于位置的记忆,和上电零点校准:
由于绝对值编码器的位置只在一圈内有效,工业机械臂经过减速后为了获取绝对位置一般是做输出端编码,但是这样精度就降低了30倍(减速比),所以更合理的是做双编码器或者低功耗编码器 电池;而我这个项目中双编码器影响结构紧凑设计,所以用了更巧妙的方式:利用电机驱动的电流环控制上电后进行低力矩的无零点定向运动,碰到机械臂限位之后确认粗零点(无限位开关归零),然后根据单圈绝对值编码器的位置精调零点。这个方式的零点是没有误差的,而且几乎不受加工精度影响,因为在12度(360/30)内都是绝对值编码器的有效精度范围。
Peak的固件说明:
Peak基于X-Track项目,大家可以去Peak仓库查看。
关于上位机视频中的软件仿真基于RoboDK,我在视频中开发了连接Dummy的Driver(驱动部分官方document有介绍的,原版是基于TCP网络接口,我修改成了串口并兼容dummy的协议)。不过由于这个软件是收费的,因此我也基于Unity3D开发了自己的上位机,已经发布在仓库。
上位机目前暂时没有计划开源,因为还有很多功能要添加,我也是希望最后能做成一个类似RoboDK的通用软件,大家以后自己做机械臂也能用上,当然软件肯定会是免费的。
关于控制算法首先运动学部分是已经实现了的,正逆解都是传统DH参数计算的,正解(关节角求末端位姿)是唯一解比较好办,逆解(末端位姿求关节角)的话会涉及多解(一般是8个),我这里使用的算法是求解上一姿态和目标姿态中6个关节变化最大角里面最小的那一组作为逆解采用的config。这样可以保证机械臂始终以最小转角进行姿态切换。
然后关节角到电机驱动器输入信号的转换这一块,我使用的是梯形加减速曲线进行速度位置规划。举个例子在MoveJ指令中,当收到一个关节角运动指令,控制器会进行运动角度差分计算,得到6个运动差分角度,然后取6个差分角中最大的角θ,同时根据设置的JointSpeed参数计算运动θ角需要的时间(考虑上加减速),把这一时间作为其余5个电机的运动参数计算各自的加减速度&最高速度,然后6个电机根据计算的参数同步运动,就可以保证其同步性和流畅性了。
另外六个电机使用CAN总线连接,每个电机接受两个ID号的信息(自己的ID、0号ID),0号ID作为信息广播和同步用。电机接收到运动指令后将信息储存在影子寄存器中,待收到广播的同步信号后开始运动,这样能进一步保证电机同步性。
最后,动力学部分还在开发中,这块暂时没有完全实现。上述的运动学和动力学算法都强烈建议去看一下《机器人学导论》这本书,里面写得非常详细。
指令模式Dummy固件支持三种不同的指令模式(指令可以由USB、串口、CAN接收),不同模式的特性有所区别,见下表:
指令发送频率
指令执行方式
可被新指令打断
指令间停顿
适合场景
SEQ(顺序指令)
随机,低(<5Hz)
FIFO队列依次执行
否
有
一次性发送几个关键点位姿,等待依次执行,可以确保关键点到达;但是由于关键点之间存在减速到0的过程所以存在一定停顿;适合场景例如视觉抓取、码垛等应用。
INT(实时指令)
随机,频率不限
指令覆盖,立即执行
是
无
用于实时控制,新指令会覆盖正在执行的指令得到立即响应;但是如果一次性发送一系列指令的话则效果会是只执行最后一条;适合场景例如动作同步。
TRJ(轨迹跟踪)
固定,高(200Hz)
自动插值,固定周期执行
否
无
适合用于需要进行精确轨迹跟踪的应用,速度会放慢;示例场景比如3D打印、雕刻、绘画等。
想要项目源码,记得转发 关注 私信
私信【智能机械臂】
,