复数的引入大大简化了三角函数的计算,如傅里叶变换和拉普拉斯变换都因复数的引入而得到更为广泛的应用,特别是欧拉公式的出现,使得许多计算变得简单

如下公式x(t)=Ae^j(Ωt Ф)就是在欧拉公式的基础上引入了,它是一个描述有关旋转运动的公式,也就是和正弦,余弦函数有关,这个公式在复数平面上可以分解为含有实部的余弦和虚部的正弦,如下图所示
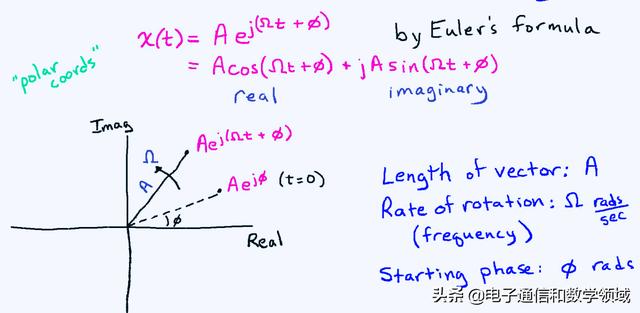
为了更好的说明这一点,我们将含有实部的余弦和虚部的正弦分别与公式x(t)=Ae^j(Ωt Ф)相对应,就是如下图的样子

如果将其表示成动态旋转的圆周运动,y坐标表示的是Asin(2πf Ф),x坐标表示的是Acos(2πf Ф)

因e^(jωn)表示带有方向的向量, jωn表示逆时针旋转,-jωn表示顺时针旋转,根据简单的向量运算,我们可以得到e^(jωn)和e^(-jωn)表示下的正弦余弦函数。如下图清楚的说明了这一点


我们现在用一个动态原理图更加形象的说明下三角函数的复数原理
假设Z=e^(0 3.1412i)t,所以这是一个半径为1的螺旋线,在此用虚数平面表示这个模型:Y表示实轴,Z表示虚轴,X表示时间t,下图所示

这个螺旋线在XZ平面上投影就是一个正弦函数图形

在在XY平面上的投影就是一个余弦函数图形

在YZ平面上的投影就是一个单位圆

如下图更为直观的表达了上述观点,







