什么是超声波雷达
超声波是频率高于20000赫兹的声波,它方向性好,穿透能力强,易于获得较集中的声能,在水中传播距离远,可用于测距、测速、清洗、焊接、碎石、杀菌消毒等。
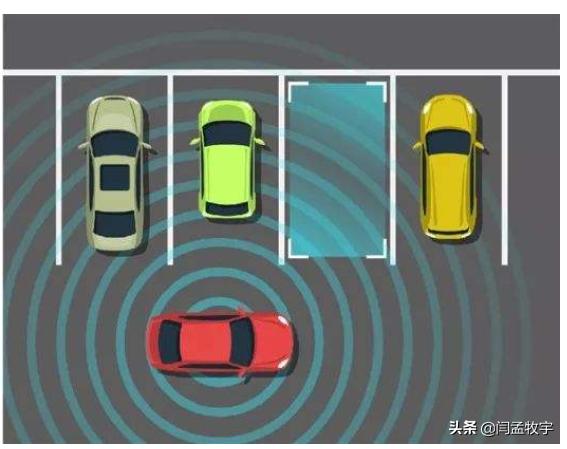
超声波雷达听着很陌生,但其实一直被广泛使用在汽车上,我们常见的倒车雷达就是一种超声波雷达。在倒车时,慢慢挪动车子的过程中,在驾驶室内能听到”滴滴滴“的声音,这些声音就是根据超声波雷达的检测距离给司机的反馈信息。

超声波能被任何材质的障碍物反射,探测角度通常在120°左右,探测距离一般在0.1~5米之间。超声波的探测距离为什么这么近呢?为什么只有在倒车、自动泊车等低速场景才使用超声波雷达呢?超声波雷达的工作原理是什么呢?下面我带大家一起来看看。

超声波雷达的工作原理
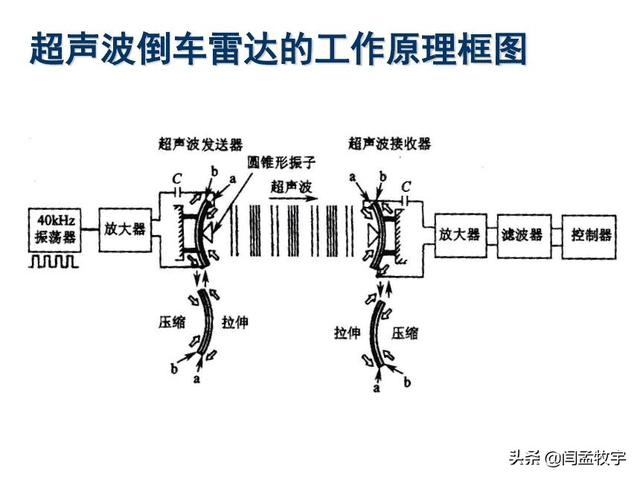
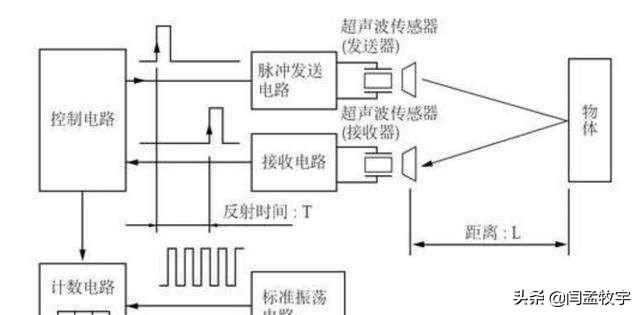
超声波发射器向外面某一方向发射出超声波信号,在发射超声波时刻的同时开始进行计时,超声波通过空气进行传播,传播途中遇到障碍物就会立即反射传播回来,超声波接收器在收到反射波的时刻就立即停止计时。超声波在空气中的速度为340m/s,计时器记录时间为T,发射点到障碍物的距离为L,L=340*T/2。
目前,常用探头的工作频率有 40kHz、48kHz 和 58kHz 三种。一般来说,频率越高,灵敏度越高,但水平与垂直方向的探测角度就越小,故一般采用 40kHz 的探头。
超声波的探测距离L一般为0.1m~2.5m(UPA)、0.3m~5m(APA);
单个探头的扫描周期一般为50ms(自检、初始化10~20ms,5m探测距离需要30ms,5m*2/340m/s≈30ms);
超声波雷达探头的水平探测角度一般为120°(UPA)、80°(APA);
垂直方向探测角度为120°(等方性传感器,水平角度与垂直角度相同),或60°、45°(异方性传感器,水平角度与垂直角度不同);

等方性传感器的缺点在于垂直照射角度过大,容易探测到地,无法侦测较远的距离;
异方性超声波探头产生的超声波波形强弱较不易稳定,而容易产生误报警的情况。
超声波雷达的特性
特性一:温度敏感
超声波雷达的波速跟温度有关。近似关系如下:C = C0 0.607 ∗ T,C0为零度时的声波速度332m/s,T为温度(单位:℃)。
例如,温度在0℃时,超声波的传播速度为332m/s;温度在30℃时,超声波的传播速度为350m/s。相同相对位置的障碍物,在不同温度的情况下,测量的距离不同。所以为了获得高精度的探测信息,车载超声波雷达系统通常要有一个温度补偿电路。
特性二:无法精确描述障碍物的位置
超声波雷达在工作时会返回一个探测距离的值,如图所示。处于A处和处于B处的障碍物都会返回相同的探测距离d。所以在仅知道探测距离d的情况下,通过单个雷达的信息是无法确定障碍物是在A处还是在B处的。

通过多个超声波探头两两配对,可以输出一个相对准确的障碍物位置。
特性三:只能应用于低速场景
因为声波速度太低,单个探头的扫描周期一般为50ms(自检、初始化10~20ms,5m探测距离需要30ms,5m*2/340m/s≈30ms),在车速较高时会出现漏检,尤其是用于侧向换道,侧向障碍物预警时,漏检率非常高。会有部分车企在车速高于20km/h时会让超声波雷达休眠,以起到节能、延长寿命、减少误警的作用。
特性四:盲区
探头发出超声波时,由于超声波发送器在发送超声结束后,会由于惯性继续振动,从而产生余振。在受到余振干扰期间,超声波接收器无法分辨出超声波回波和余振,必须等余振结束后才能运行。由于这段时间里无法进行测距步骤,称之为盲区。
探测距离越远,发送功率需要越大,余振时间就会越长,导致盲区越大。通过使余振尽快衰减至零或足够小,可以达到减少盲区的目的。在近距离勘测时,也可以适当地减少超声波发射的功率,从而减小余振。
超声波雷达系统的迭代
第一代:模拟雷达:无源探头 主机 连接线;
所有功能都在主机上实现(电压转换、探头驱动、障碍物距离计算、回波放大、检波、与显示器通讯);
探头只起到发送和接收超声波的作用;
探头需要依次工作,数据更新频率低;
易误报(微弱的探头回波信号易受干扰,线束需要用屏蔽线,不同主机的线束需要隔离)。
第二代:半数字雷达:无源探头(集成放大电路) 主机 连接线;
探头增加了放大电路,增强了探头的抗干扰能力。

第三代:带主机数字雷达安全系统:数字探头 主机 连接线;
所有电路(电源、驱动、回波放大、检波、雷达解码)都集成在探头上,每个探头可以独立输出侦测到的距离;
带有主机,每个探头的工作顺序由主机分配。最终障碍物距离由主机计算,并由主机传给整车;
精度、灵敏度、探测距离、抗干扰性进一步提高。
第四代:无主机数字雷达安全系统:数字探头 连接线;
去掉了主机对探头的控制功能,每个探头只要通电,即可工作;
数据更新频率增高;
每个探头不再需要固定的ID号,改由软件动态分配ID号,探头可互换;
无主机,易安装,摆脱了主机接口数量限制,探头数可随意扩充。
数字探头,精准度、探测距离、抗干扰性能都大大提高。
超声波雷达在汽车上的应用
超声波雷达除了用在倒车预警系统外,还会用在前车防撞、油门防误踩、盲区监测、自动泊车、障碍物检测、泊车位检测、高速横向辅助中。
自动泊车功能需要经历两个阶段:1.识别库位;2.倒车入库
汽车缓缓驶过库位时,汽车侧方的APA传感器返回的探测距离与时间的关系。
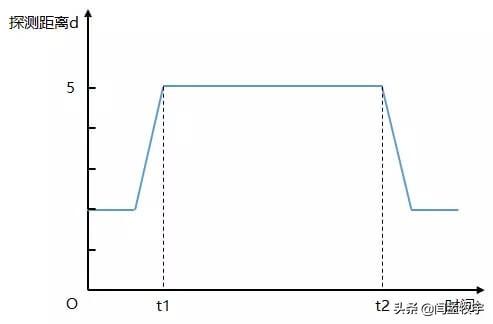
将t1时刻到t2时刻的车速做积分即可得到库位的近似长度,如果近似认为汽车为匀速行驶,直接用车速乘以(t2-t1)即可。当检测的长度超过车辆泊入所需的最短长度时则认为当前空间有车位。
检测到泊车位后,仪表会给驾驶员提示是否泊车,驾驶员选定泊车位后,智能驾驶ECU会自动规划出一条全局路径,然后控制车辆的转向、油门、制动进行泊车。

油门防误踩:可以通过超声波实时监测前方或后方障碍物信息,当驾驶员在需要紧急刹车的情况下,反而把油门误当作了刹车踩这一情况,激活刹车系统,将汽车刹停。
高速横向辅助:特斯拉Model S在AutoPilot 1.0时代就实现了高速公路的巡航功能,为了增加高速巡航功能的安全性和舒适性,特斯拉将用于泊车的APA超声波雷达,也用在了高速巡航上。当侧方驶过的汽车离自车较近时,Model S在确保另一侧有足够空间的情况下,自主地向另一侧微调,降低与侧向车辆的碰撞风险。


超声波雷达装车常见工程问题
1.超声波雷达误报警
导致超声波雷达误报警的原因可能是:雷达探头表面漆面不均匀或漆面过厚;
雷达安装孔开孔过小或不均匀导致雷达探头挤压;
雷达支架与硅胶圈之间有残漆,导致雷达探头受挤压;
探头与支架之间用于消除旁瓣的硅胶圈变形,失效;
信号在线束传递过程中受到干扰;
2.超声波雷达打地
超声波雷达在设计时需要结合安装位置(安装高度、安装面与地面夹角)、探头的垂直检测角度、实际需要的检测距离、探头支架的上扬角度去综合考虑。在装车后出现打地可以考虑通过提高安装位置、增大探头上扬角度、降低探测距离等手段解决该问题。
超声波雷达产业
截至2021年5月,汽车之家在售车型有8998款,配置了倒车雷达的车型有7074款,渗透率达到79%;其中配置前向雷达车型有2531款,渗透率达到28%。目前超声波雷达较为成熟,市场渗透率较高,价格已经下探到了较低水平,已有豪恩、同致、奥迪威等多家国产厂商切入到该市场。

博世、法雷奥是超声波雷达产业的巨头,这两家公司控制着倒车用超声波雷达的主要市场。除了这两家,国际厂商如日本村田、尼塞拉、电装、三菱、松下等也很有影响力。
国内厂商则有台湾同致电子、深圳航盛电子、深圳豪恩、苏州优达斯、深圳顺禾、辉创、上富、奥迪威等。厂商数量很多,但是少有能够进入汽车前装市场的。
,