移动缝翼襟翼操纵杆,进而旋转指令传感器组件(CSU),该组件向每个SFCC发出新的位置指令信号。该信号在襟翼通道1和2中进行处理,在SFCC襟翼通道中比较反馈位置拾取组件(FPPU)的位置需求和实际位置。如果请求的位置和实际位置不同,则每条通道生成指令信号,由输出模块进行比较。如果指令信号一致,输出模块生成PCU阀块激活的驱动命令。每个SFCC通道控制其相关的电磁阀。
当伸出电磁阀通电时,控制阀滑阀从空档向完全偏转位置移动。滑阀的移动方向控制马达的旋转方向。
滑阀的移动程度控制马达的转速。控制阀滑阀的位置由安装在阀块一端的线性可变差动传感器(LVDT)监测。
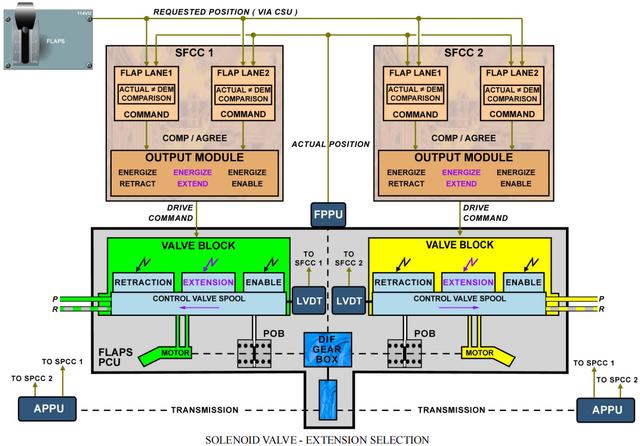
电磁阀-伸出流程选择
高速运动启用电磁阀通电以解锁POB,襟翼开始伸展。在控制阀滑阀完全偏转的情况下,最大可用液压油被引导至液压马达,液压马达以全速运行以进行襟翼伸展。
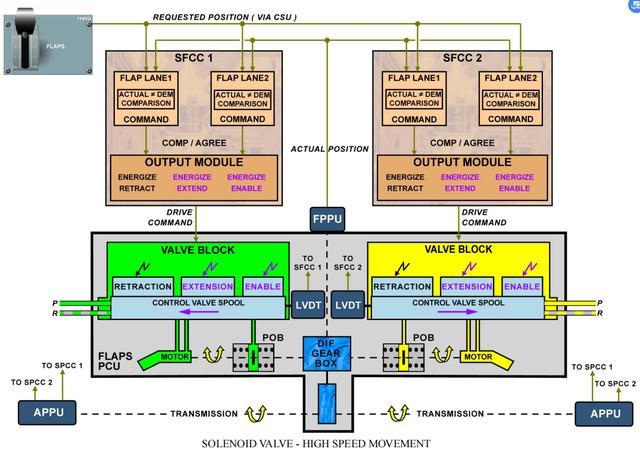
电磁阀-高速移动
低速运动当襟翼接近FPPU检测到的请求位置时,SFCC使缩回电磁阀通电。从而使滑阀控制活门缓慢移回空档位置。控制阀滑阀的移动降低了液压油流量,从而降低了液压马达转速。

电磁阀-低速移动
我是夜猫,带你看看飞机。
,




