4.2定义伺服电动机
4.2.1伺服电动机的类型
伺服电动机的类型有两种:“运动轴”类型和“几何”类型。当选择“运动轴”类型时,需要选择机构的一个运动连接(如销连接或滑块连接),并可以通过“反向”按钮调整连接的运动方向;当选择“几何”类型时,“电动机”操控板如图4.2.1所示,此时可以规定机构中的某一几何图元作特定的运动。

伺服电动机可以在连接轴或几何图元(如零件平面、基准平面和点)上放置。对于一个图元,可以定义任意多个伺服电动机。但是,为了避免过于约束摸型,要确保进行运动分析之前,应关闭所有冲突的或多余的伺服电动机.例如沿同一方向创建了一个连接轴旋转伺服电动机和一个平面一平面旋转伺服电动机,则在同一个运行期间内不要同时打开这两个伺服电动机.
伺服电动机的常见定义方法如下。
●连接轴伺服电动机:直接选择一个机构连接,用于创建旋转运动或直线运动.
●几何伺服电动机:利用下列简单伺服电动机的组合,可以创建复杂的三维运动(如螺旋或其他空间曲线). 平面一平面平移伺服电动机:这种伺服电动机是相对于一个主体中的一个平面来移动另一个主体中的平面,同时保持两平面平行.当从动平面和参考平面重合时,出现零位五。平面一平面平移伺服电动机的一种应用,是用于定义开环机构装置的最后一个链接和基础之间的平移. 平面一平面旋转伺服电动机:这种伺服电动机是移动一个主体中的平面,使其与另一主体中的某一平面成一定的角度。在运行期间,从动平面围绕一个参考方向旋转,当从动平面和参考平面重合时定义为零位五.因为未指定从动主体上的旋转轴,所以平面一平面旋转伺服电动机所受的限制要少于稍打或圆柱接头的伺服电动机所受的限制,因此从动主体中旋转轴的位里可能会任意改变.平面一平面旋转伺服电动机可用来定义围绕球接头的旋转;另一个应用是定义开环机构装置的最后一个主体和基础之间的旋转.点一平面平移伺服电动机:这种伺服电动机是沿一个主体中平面的法向移动另一主体中的点。以.点到平面的最短距离浏童伺服电动机的住豆值.仅使用点一平面伺服电动机,不能相对于其他主体来定义一个主体的方向.还要注意从动.点可平行于参考平面自由移动,所以可能会沿伺服电动机未指定的方向移动.使用另一个伺服电动机或连接可锁定这些自由度.通过定义一个点相时于一个平面运动的X.y和2分量,可以使一个点沿一条复杂的三维曲线运动。平面一点平移伺服电动机:这种伺服电动机除了要定义平面相对于点运动的方向外,其余都和点一平面伺服电动机相同.在运行期间,从动平面沿指定的运动方向运动,同时保持与之垂立.以点到平面的最短距离浏全伺服电动机的位I值.在零位I处,点位于该平面上.点一点平移伺服电动机:这种伺服电动机是沿一个主体中指定的方向移动另一主体中的点.可用到一个平面的最短距离来测I该从动点的位里,该平面包含参考点并垂直于运动方向。当参考.东和从动点位于一个法向是运动方向的平面内时,出现点一点伺服电动机的零位豆。点一点平移伺服电动机的约束很宽松,所以必须十分小心,才可以得到可预期的运动。仅使用点一点伺服电动机不能定义一个主体相对于其他主体的方向.实际上,需要六个点一点伺服电动机才能定义一个主体相对于其他主体的方向.使用另一个可MA电动机或连接可锁定一些自由度.
4.2.2伺服电动机的轮廓
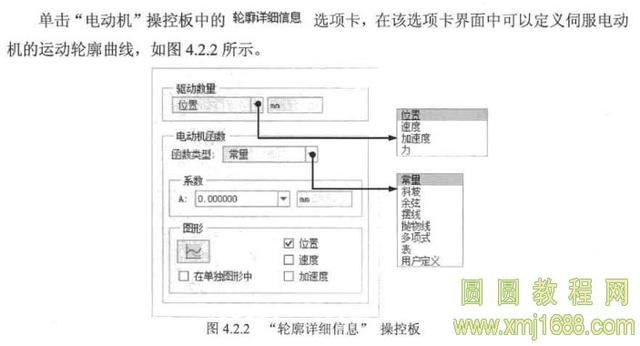

1.常量
该选项可以设置机构的位置、速度和加速度为恒定值,函数表达式为y=A,其中A=常量.当定义其中的某个参数后,其他参数的轮廓函数将自行出现,并能以图表的形式进行显示。
下面说明函数的设置和图表显示的一般操作方法。



图4.2.5所示的“图形窗口选项”对话框中的各选项卡功能简介如下。
●Y轴选项卡:如图4.2.5所示,该选项卡主要用于设I函数图形的Y轴显示范围 (位移、速度和加速度的显示〕、刻度线的数童、文本标签的样式、姗格线的控制、图形线的粗细等参数.
●X抽选项卡:如图4.2.6所示,该选项卡主要用于设五函数图形的X轴显示范围(时间范围)以及其他参数。X轴和Y轴选项卡中各选项的说明如下.




2.斜坡
该选项可以设置机构的位置、速度和加速度为恒定值或随时间成线性变化的运动,函数表达式为Y=A B*t.其中A为常量:B为斜率。



3.余弦
该选项可以设置机构的位置、速度和加速度为振荡往复运动,函数表达式为y = A*cos(2*Pi*tr/B) C。其中A为振幅:B为相位:C为偏移量:T为周期.

4. SCCA
SCCA是指“正弦一常数一余弦一加速度(Sin-Constant-Cos-Acceleration )",即一条包含正弦、常数、余弦的复合曲线且仅用于加速度的设置。根据时间参数t的范围,表达式分别如下。







6.抛物线



7.多项式

8.表
该选项可以通过输入或导入时间与对应模的值来定义伺服电动机,当机构的运动规律不能用函数来表达时,可以采用此方法来拟合运动曲线的功能.表文件可以预先进行编制,其扩展名为.tab,可以在任何文本编辑器中创建或打开。文件采用两栏格式:第一栏是时间,该栏中的时间值必须从第一行到最后一行按升序排列:第二栏是速度、加速度或位置。
下面说明使用“表.选项定义伺服电动机的一般操作方法。






9.用户定义









