(报告出品方/作者:德邦证券,陈海进)
1. 自动驾驶推高激光雷达关注度,量产元年迎拐点1.1. 多传感器融合为 L3 级及以上自动驾驶感知层方案的未来发展趋势
1)自动驾驶主要分为 L0-L5 五个级别,L3 级以上提升对系统感知的要求。 国际自动机械工程师学会(SAE)将自动驾驶分为 L0-L5 五个级别,其中系统在 L1-L3 级阶段主要起辅助作用。从 L2 级升至 L3 级,车辆的操作控制对象发生了 主要变化,L2 级及以下仍旧由驾驶员负责环境的感知;L3 级及以上则由系统负责 环境的感知和系统全部动态驾驶任务,驾驶员不需要一直对方向盘进行掌控,仅 需在特殊情况发生时对系统提出的干预请求进行回应。当自动驾驶级别上升至 L4 级车辆驾驶便全由系统负责, L5 与 L4 的区别在于是在特定场景还是全场景的应 用。
L0:完全人类驾驶。L1:辅助驾驶,增加了预警提示类的 ADAS 功能,包括 车道偏离预警(LDW),前撞预警(FCW),盲点检测(BSD)等。L2:部分自动 驾驶,具备了干预辅助类的 ADAS 功能,包括自适应巡航(ACC),紧急自动刹车 (AEB),车道保持辅助(LKA)等。L3:有条件自动驾驶,具备了综合干预辅助 类功能,包括自动加速、自动刹车、自动转向等。L4:高度自动驾驶,没有任何 人类驾驶员,可以无方向盘、油门、刹车踏板,但限定区域(如园区、景区内), 或限定环境条件(如雨雪天、夜晚不能开)。L5:完全自动驾驶,是真正的无人驾 驶阶段,司机位置无人,也没有人的车内或车外的认知判别干预;无方向盘和油 门、刹车踏板;全区域、全功能。

2)智能驾驶的上游主要分为感知-决策-执行层三个层级
自动驾驶可以分为感知层、决策层、执行层,其中感知器主要包括车辆运动、 环境感知两大类。车辆运动传感器为车辆运行过程中相关速度、角度提供全姿态 的信息参数和高精度的定位信息,环境感知传感器主要由激光雷达、毫米波雷达、 超声波雷达、摄像头等组成,将感知的数据融合提供给决策处理层,决策层通过 中央处理系统、芯片、算法等将接收到的数据进行处理,最终输出相应的操作与 指令任务给执行层,执行层则负责对此完成相应的动力供给、方向控制、车灯控 制等动作。
3)自动驾驶的传感器配置,业内主要有纯视觉路线和多传感器融合两大阵营
目前自动驾驶主要分为两派,一派走的是以特斯拉为代表的纯视觉路线,另 一派走的是以激光雷达等多传感器融合为代表的路线。
纯视觉路线以摄像头为主导,由于摄像头精确度较低,所以一般对于算法和 计算能力的要求更高。特斯拉通过“D1 人工智能芯片 Dojo 超级计算机群 无监 督学习算法”打造纯视觉路线的底层支撑,D1 芯片作为 Dojo 超级计算机系统的 一部分,可以将摄像头内收集到的视频数据进行无监督学习算法的模型训练,减 少人工标注的工作量。摄像头成本较低,但劣势在于摄像头在黑暗环境中精度有 所下降,因此对数据样本库的容量和模型的精度要求较高。超声波雷达、毫米波 雷达、激光雷达等雷达类测距传感器融合方案精确度更高,但是由于技术尚未完 全成熟,量产的成本高昂。
激光雷达性能表现优越,在目标轮廓测量、角度测量、光照稳定性和通用障 碍物检出等方面突出。激光雷达由激光发射机、光学接收机、转台和信息处理系 统等组成,激光雷达是以激光为工作光束,并工作在红外和可见光波段的雷达。 激光雷达通过激光器将电脉冲变成光脉冲发射出去,在探测目标的表面引起散射 并由接收器将反射回来的光脉冲还原成电脉冲并送到显示器。根据激光测距原理 (包括脉冲激光和相位激光)便可以瞬间测算出从激光雷达到目标点的距离,利 用三维激光扫描技术不断扫描目标物获得空间点云数据,根据目标物体表面反射 的能量大小、波谱幅度、频率和相位等信息可以最终建立结构精确复杂的三维立 体图像。
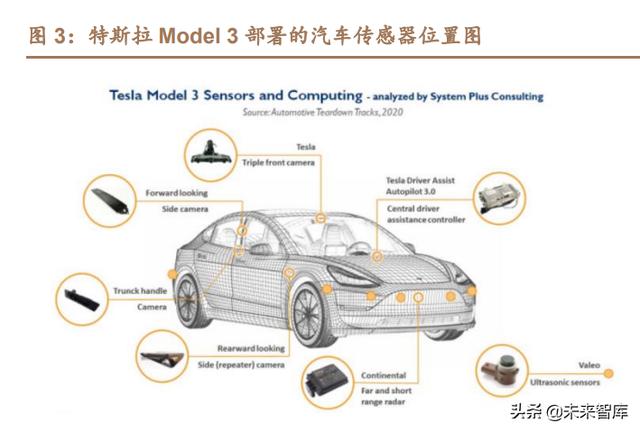
我们认为以激光雷达等多传感器融合为代表的方案将随着技术的进步、成本的不断下探,未来预计成为 L3/4 级及以上智能驾驶的核心配置。目前 L2 级及以 下级别的自动驾驶使用的方案以视觉派为主,未来随着自动驾驶向 L3 级及以上迈 进,自动驾驶系统将负责环境感知、系统决策等功能,若沿用纯视觉方案,摄像头 摄取的图形数据量将过大,基于视觉的神经网络算法将对运算能力提出极高的要 求。特斯拉 Model 3 采用的传感器为 "8 个摄像头(3 个摄像头组成的前视摄像模 组 1 个后视摄像头 2 个侧前视摄像头 2 个侧后视摄像头) 1 个毫米波雷达 12 个超声波传感器",汽车大脑 FSD 计算机满足运算需求;采用多传感器融合的主 流车企在激光雷达的配载上基本采用短程 中程 远程三种激光雷达,以及摄像头 毫米波 互补传感器来形成互补。
1.2. 激光雷达应用领域不断迭代拓宽,自动驾驶市场关注度走高
激光雷达发展历史久远,从测绘领域不断拓展,下游应用场景丰富。1960 年 代-1990 年代初期,激光器问世,早期广泛应用于探测领域的激光雷达价格高昂。 2000 年代初期-2010 年代早期,海外激光雷达厂商崛起,高线数激光雷达应用于 无人驾驶领域。2016 年-2018 年,海内外初创公司入局研究高线数激光雷达并取 得突破者众多,此外激光雷达技术也从机械式逐渐创新扩展至半固态式或固态式, 如半固态 MEMS 激光雷达、固态 OPA 激光雷达等,下游应用领域不断拓展至高 级辅助驾驶和服务机器人领域,且已在下游应用中进行小范围商业试点。2019 年 至今,激光雷达发展迅速,激光雷达技术朝向芯片化、阵列化发展,Ouster 推出 基于 VCSEL 和 SPAD 阵列芯片技术的数字化激光雷达;调频连续波(FMCW) 激光雷达技术方案开始受到市场关注,2020 年海外激光雷达市场迎来上市潮。
1.3. 众多车企已实现 L3 级自动驾驶车辆的量产,全球自动驾驶加速渗透
目前车企要实现 L4 级自动驾驶技术的量产主仍存在一些难点,L3 级自动驾 驶量产成为近三年大部分国内自主车企的选择。目前要实现 L4 级自动驾驶技术 的量产,主要有 1)安全:传统车企经过漫长的时间发展已经在客户心中建立了较 为成熟的品牌效应,历史基因决定其将安全放在首位,任何的安全事故都会对长 久以来车企塑造的可靠品牌产生不可磨灭的影响。2)成本: L4 级自动驾驶的产 业链尚不成熟,且零部件成本高昂,短期内难以达到车企的量产条件。3)技术: L4 级自动驾驶对于传感器要求更高,短期大多数车企无法一下子从 L2 级跨度到 L4 级。4)路权:政府路权对于自动驾驶的发展的进程影响较大, L4 级自动驾驶 短期较难投入使用。由于 L4 级自动驾驶技术对于科技互联网公司和自动驾驶全栈 解决方案提供商而言,实现起来都有一定的难度,从国内自主车企 L3/L4 自动驾 驶量产时间表规划来看,近三年是大多数国内自主车企的“L3 级自动驾驶量产年”。
全球自动驾驶渗透率将快速提升。根据前瞻产业研究院的预测,2020 年,L1、 L2 级自动驾驶渗透率将达 40%;2025 年,20%以上量产汽车有望实现不同级别 的智能驾驶;至 2040 年,所有新车都将配备自动驾驶功能,其中 L4、L5 级自动 驾驶渗透率将达 50%。
2. 激光雷达市场规模空间广阔,格局分散下海外厂商暂占先发优势激光雷达高速发展,全球市场规模预计 2025 年达到 135 亿美元,其中智能 驾驶市场规模约 46 亿美元。根据 Allied Market Research 预计,2026 年全球无 人驾驶技术市场规模将达到5567亿美元,2019-2026年期间CAGR达到39.47%。 据 Frost&Sullivan 预计,自动驾驶车辆增长、激光雷达在高级辅助驾驶中渗透率 增加、服务型机器人及智能交通建设等领域需求增长,激光雷达市场预计将高速 发展,预计 2025 年全球市场规模将达到 135.4 亿美元,2019-2025 年期间 CAGR 达到 64.5%。
高级辅助驾驶、无人驾驶将成为激光雷达主要应用领域。按激光雷达下游应 用市场分,主要有无人驾驶、高级辅助驾驶市场(ADAS)、服务型机器人市场、 智慧城市和测绘市场。据 Frost & Sullivan 预计,2019 年智慧城市及测绘作为激 光雷达的主要应用市场占比约 60%,预计高级辅助驾驶、无人驾驶将高速发展, 2025 年分别占激光雷达市场总规模的 34.64%、26.30%。

2025 年中国激光雷达市场规模将达到 43.1 亿美元,其中智能驾驶市场规模 约 12 亿美元,下游应用领域多点开花。据 Frost & Sullivan 预计,中国激光雷达 市场规模将于 2025 年达到 43.1 亿美元,2019-2025 年期间 CAGR 达到 63.1%, 无人驾驶及高级辅助驾驶为主要组成部分。国内百度、滴滴、小马智行、文远知行 等企业的无人驾驶出租车业务已经开始试运营,商业化推进后将进一步拉动激光 雷达需求增长,据麦肯锡预计,2030 年中国自动驾驶乘用车数量将达到 800 万 辆。中国作为全球最大的新车销售市场,根据 2020 年 11 月发布的《智能网联汽 车技术路线图(2.0 版)》中规划,2030 年中国 L2、L3 级渗透率要超过 70%。 “新基建”受到国家政策大力支持,计划总投资额高达 34 万亿元,其中多地出台 重点项目投资“5G 车联网”的协同发展,且截至 2020 年,中国以约 800 个规划 或流程中的智慧城市试点项目占全球智慧城市总数将近一半,这部分应用也将对 激光雷达市场的增长产生较为稳定贡献。
随着 L3 级自动驾驶的不断落地,激光雷达也将在乘用车市场持续渗透。从 单价趋势看,激光雷达技术不断迭代进步、未来商用大规模量产可期,我们预计 激光雷达价格将由 2021 年的 1500 美元/颗下探至 2025 年的 400 美元/颗。从乘 用车市场激光雷达的需求看,我们预计全球的需求量将由 2021 年的 19 万颗提升 至 2025 年的 2704 万颗;国内的需求量预计由 2021 年的 10 万颗提升至 2025 年 的 1399 万颗。根据我们测算,2025 年全球及中国车载市场激光雷达市场规模分 别为 127 亿美元、65.8 亿美元左右,2021-2025 年 CAGR 分别为 147%、149%。

全球激光雷达竞争格局分散,海外厂商具有明显领先优势。法国 Tier 1 公司 Valeo(法雷奥)作为全球首个发布车规级激光雷达 Valeo SCALA 并实现量产的 厂商,目前全球 ADAS 领域激光雷达的销售主要仍由 SCALA 贡献。根据 Yole 的数据,Valeo 以 8 项专利数量取得市占率 28%居于全球首位,此外,中国速腾 聚创、大疆、图达通、华为、禾赛等国内头部玩家也均有所突破。从目前中国激光 雷达行业市场竞争情况看,禾赛科技占有 14%的市场份额,万集科技与道通科技 各 4%。
3. 主流传感器产品众多,激光雷达综合性能优越3.1. 激光雷达作为 L3 级自动驾驶的核心配件综合性能优越
各个传感器均有其优劣势,适用于不同的应用场景,激光雷达作为 L3 级自 动驾驶的核心配件综合性能优越。主流的自动驾驶环境监测传感器主要包括摄像 头、毫米波雷达、超声波雷达与激光雷达。激光雷达的通过建立三维点云图,可以 实时进行环境感知,探测精度也更优越。同属于光学传感器的摄像头和激光雷达 在大雨雪雾等极端天气受影响大,但在清晰的环境下,激光雷达在白天和黑夜中 等距离(150 米左右)的探测精度要超过毫米波雷达。
从目前多融合传感器派系厂商的车企技术规划来看,激光雷达、毫米波雷达、 超声波雷达等多传感器、多路线融合使用的方案占据主流。衡量自动驾驶传感器 性能的十个特征:近地探测、探测距离、分辨率、夜间工作能力、日间工作能力, 雪/雾/雨工作能力、色彩对比度、探测速度、传感器大小、传感器成本。特斯拉的 传感器采用视觉为主,超声波雷达为辅的解决方案:一辆 Model 3 上,共有 8 个 摄像头,1 个毫米波雷达,12 个超声波雷达,多种传感器组合特征值变现较高。 从近两年主流新势力车企、自主品牌、外资/合资车企规划交付车型的传感器搭载 方案看,激光雷达作为实现 L3 级及以上自动驾驶的核心配置必不可少,多传感 器、多路线融合的方案可以助力自动驾驶实现性能的多维提升。(报告来源:未来智库)

3.2. 激光雷达技术路径众多,厂商竞争百花齐放
3.2.1. 扫描方式:半固态占主流地位,长期看好固态的商用落地
按扫描方式分,主要有机械式、半固态式(包括 MEMS、棱镜、转镜等)、固态式(主要是 OPA、Flash 两种方案)三种路径。
机械式激光雷达体积大、成本高,主要用于 Robotaxi 等领域。机械式激光 雷达在竖直方向上布局了多组的激光线束,发射和接收模块需要 360 度旋转进行 激光线的发射和扫描,因此体积更大,价格也更加昂贵。机械式激光雷达价格普 遍较高。目前 Velodyne 的 64 线式产品价格约 8 万美元,16 线式产品价格为 4000 美元;禾赛科技的机械式激光雷达均价约 10 万元人民币。由于机械式激光雷达排 列了多组激光发射模组,可以做到 128 线/64 线/32 线/16 线/8 线 4 线多种线别的 激光雷达,线别越高通常性能高、价格更高;但机械式激光雷达的主要缺点是多 组激光发射模组导致的体积庞大难以满足车规级的严苛要求,且通过增加收发模 块的数量实现高线束,相应的元器件成本也更高,此外分立的收发组件设计导致 生产过程中需要进行人工光路对准,装配复杂、可量产性差。目前机械式激光雷达 主要应用于无人驾驶车辆上。目前机械式激光雷达海外市场的主要玩家有 Velydone、Ouster,国内玩家主要有禾赛科技、速腾聚创。

半固态激光雷达相比机械式激光雷达成本更低,且易过车规。半固态激光雷 达的激光器、探测器保持静止,不再进行机械旋转,并采用“微动”器件来替代机 械式的扫描器,旋转幅度只能做到 120°的水平扫描视野。从 2022 年即将量产的 配载激光雷达的车中,绝大多数搭载的激光雷达均为半固态式,单颗价格大部分 分也下探到 1000 美元以内。目前,半固态式激光雷达主要技术路线分为转镜式和 MEMS 微振镜式两种,其中转镜式半固态方案更加成熟。
MEMS 式激光雷达作为机械式激光雷达的革新形态出现,引领激光雷达体积 缩小、成本减少。MEMS 激光雷达通过 MEMS 微振镜来操纵激光束的偏转,可以 替代原来宏观的机械式旋转的部分,具有一定的半导体集成性,通过激光发射、 接收器的大幅度减少可以降低 MEMS 激光雷达的成本。并且,通过微振镜反射激 光形成较广的扫描角度和较大的扫描范围,可以形成更多点云,能够克服机械式 激光雷达在寿命和良品率的不足。根据麦姆斯咨询估算,机械式激光雷达的每组 芯片成本约 200 美元,仅 16 组的芯片成本就高达 3200 美元。采用 MEMS 微振 镜设计方案的激光雷达将各种分立芯片集成设计到激光雷达控制芯片组,从而大 幅降低激光雷达的成本,如 Innoluce 曾发布一款 MEMS 激光雷达设计方案可以 将激光雷达的成本控制在 200 美元以内。MEMS 方案目前在激光雷达市场应用较 为广泛。全球范围内,MEMS 路径代表公司为 Luminar、Innoviz、速腾聚创。其中 Luminar 主要有 Iria 和 Hydra 两款产品,Ira 预计 2022 年量产;Innoviz 已经 与宝马达成合作;速腾聚创作为全球销量最大的机械式激光雷达企业之一,在 MEMS 激光雷达上也是最早布局研发并且领先的企业之一。

转镜式激光雷达最早通过车规,目前应用广泛。转镜式激光雷达保持收发模 块静止,通过电机带动转镜运动将光束反射至一定范围并实现扫描探测,技术层 面与机械式激光雷达类似。且与 MEMS 微振镜平动和扭转方式不同,转镜通过反 射镜面围绕圆心不断旋转,因此在功耗、散热等方面优势更为明显。法雷奥推出 的全球首款车规级激光雷达就采用了转镜形式。虽然转镜式激光雷达的可靠性比 机械式激光雷达高,但由于机械部件仍较多、体积上相对较大,在实际应用中由 于旋转产生的机械摩擦在长期之下还是会影响使用的精度,因此转镜式激光雷达 也将主要作为一种过渡方案。2017 年投产的转镜式的 Valeo SCALA 最早通过车 规级验证并实现大规模量产。
固态激光雷达通过半导体工艺把激光雷达一些核心部件集成在芯片上,体积 相对机械式更小。目前固态激光雷达主要有光学相控阵 OPA 和 Flash 两种。固态 激光雷达在结构上取消了机械旋转部件,因此相较于机械式激光雷达而言体积更 小。
OPA 激光雷达技术尚未成熟,商业化进程仍需一定时间。OPA(OpticalPhased Array,光学相控阵技术)取消了机械结构,将激光控制集成在一块 OPA 芯片,具有结构简单、体积小、扫描速度快的优点,耐久度上表现更加出色,光束 控制简单,可以动态控制扫描频率、分辨率和焦距调整,通过多线多维扫描可以 获得更高的数据采集率。但另一方面,采用 OPA 技术路线的企业需要自主研发芯 片,目前硅光方案耦合损耗较大,相位调制设计方案尚不成熟,仍处于早期研发 阶段。目前相对成熟的 OPA 方案为液晶相控阵方案,但也有响应速度过慢等缺点, 不适合车载使用。且由于 OPA 激光雷达要求阵列单元的尺寸不能大于半个波长, 所以每个器件尺寸只有约500nm,材料、工艺要求极高之下成本也一直处于高位, 目前较少专注于 OPA 激光雷达开发的厂商。Quanergy 为纯固态 OPA 方案的代 表厂商,其 S3 系列是业内首款基于 OPA 技术的激光雷达。

Flash 激光雷达是目前纯固态激光雷达的主流技术方案,数据获取快,但探 测精度、距离有所打折扣。Flash 激光雷达工作原理类似数字照相机,主要是利用 单个激光器通过光扩散器在短时间直接发射出一大片覆盖探测区域的激光,照射 到探测物体的反射光通过光学透镜反馈于高度灵敏的面阵光电传感器,通过记录 激光返回时间等信息可以计算被探测物体的深度、位置等信息,减少了扫描过程 中探测目标移动而带来的问题。Flash 激光雷达对抗震要求极高,同时由于探测距 离较短,需要采用大功率激光(有人眼安全隐患)或者高灵敏度探测器(成本较 高),需要对光源能量、发射方式进行创新。受限于探测精度和探测距离,目前 Flash 激光雷达主要应用于较低速的无人驾驶场景,如无人外卖车、无人物流车等。Flash 激光代表厂商有 LeddarTech、Sense Photonics、德国大陆、IBEO、北醒光子、 Xenomatix、Ouster 等。
技术路径众多,海内外厂商百家争鸣。从不同的技术路径布局看,目前机械 式激光雷达的玩家主要有 Velodyne、Ouster、禾赛、速腾等。混合固态激光雷达 的玩家主要有基于 MEMS 的速腾、Innoviz,基于转镜式的大疆 Livox、法雷奥、 Luminar 等。纯固态激光雷达玩家有 Quanergy、Ibeo 等。
趋势判断:MEMS 方案是目前中期的主流选择,纯固态式激光雷达随着商业 化落地有望成为未来的发展趋势。机械式激光雷达具有扫描速度快,接受视场小, 抗光干扰能力强,信噪比高等优势,缺点在于价格昂贵,光路调试、装配复杂、生 产周期漫长、行车环境下可靠性不高。机械式激光雷达价格高昂, MEMS 方案可 以大幅降低成本和体积。目前 MEMS 类半固态激光雷达是市场的最主流方案,相 对于纯固态方案更容易实现,搭载车型众多,仍将成为中期的主流选择。纯固态 式激光雷达具有扫描速度快、精度高、可控性好、体积小等特点,但纯固态激光雷 达技术并没有完全成熟,未来有望迎来商业落地并成为激光雷达的发展趋势。

3.2.2. 测距方法:ToF 大规模商用,关注 FMCW 高潜测距技术
按测距方法的主要分类有:飞行时间(Time of Flight,ToF)测距法、基于 相干探测 FMCW 测距法、三角测距法。 三角测距法的原理是通过激光雷达发射器发射激光,经过物体 Object 反射回 来后被图像传感器 CMOS(图中 Imager)捕捉。通过焦点 O 作一条辅助线平行 于入射光线,交 Imager 于 X1。通过相似三角形相关原理,有 q/f=s/x,且入射角 β已知,有 sinβ=q/d,两方程联立可计算得探测距离 d=sf/xsinβ。
三角测距雷达在成本上低于 TOF 雷达,但使用过程中远距离的测量精度受 限。因三角测距法方案成熟,可以通过批量生产将成本降到很低的水平,近距离 的三角测距雷达成本已经在百元级别,相比之下进口 TOF 雷达的售价动辄在万元 以上。三角测距雷达在实际使用时并不稳定,在工业领域的应用中会受到很大限 制。根据三角测距公式,随着距离 d 的增加,β角度下的三角函数精度减弱,因 此三角测距法对于远距离测量精度较差。
TOF(Time of flight)原理能够克服三角测距发的测量距离限制,并且提高 了精度。TOF 测距原理的核心是利用光速测距,首先激光发射器对探测物体发射 激光脉冲,计时器记录发射时间;脉冲经物体反射后由接收器接受,计时器记录 接受时间,通过时间差乘以光速即得到距离的两倍。

TOF 测距法原理简单,但是实际应用中需要克服一些难点。1)计时问题:由 于 ToF 利用光速测距,光速非常快所以测量时间非常短,对计时器的精确度要求 非常高。2)脉冲问题:a)发射器端,需要发射高质量的脉冲激光,对于出射光 脉宽要求在几纳秒左右,对上升沿的要求越快越好;b)接收器端,需要尽可能保 持信号不失真。在进行回波信号处理时,要尽量保证信号不失真;即使信号没有 失真,对于同一距离的不同物体测距时前沿也会有所变动,从而得到不同的回波 信号。
FMCW 测距法比 TOF 抗干扰能力更强,但技术门槛、价格高,目前尚未量 产。FMCW 属于相干测量方式,主要通过发送和接收连续激光束,把回光和本地 光做干涉,并利用混频探测技术来测量发送和接收的频率差异,再通过频率差换 算出目标物的距离。 FMCW 测速能力及灵敏度较强,且抗干扰能力强。ToF 使用时间来测量距离, 容易受环境光干扰;而 FMCW 使用频率来测量距离,具有探测距离远,抗干扰能 力高,功耗低等特点。据高工智能产业研究院,FMCW 的灵敏度超 ToF 十倍,功 耗比 TOF 低 1000 倍。FMCW 技术门槛高,探测距离远带来的高损耗,对系统集 成、信号处理要求很高,因此价格也比 TOF 雷达更高,目前尚未量产。
TOF 的应用则更为广泛,目前是激光雷达厂商的主流测距方案。三角测距雷 达远距离测量精度受影响,使用场景受限,目前主要应用于室内短距离测距,最 典型的场景为扫地机器人。而在探测范围较大场景(比如商场、机场或者车站), 以及室外场景,由于易受环境光干扰,且裸露在外转动的方案使其在防尘防水方 面非常脆弱,在一些特殊场景的应用如 AVG 小车工作的车间经常会有很多灰尘, 三角雷达的电机非常容易损坏。相比之下,TOF 雷达采用半固态设计,防护效果 更优秀,工作寿命也更长。ToF 是目前市场车载中长距激光雷达的主流方案, FMCW 理论优势明显,预计未来随着 FMCW 激光雷达整机和上游产业链不断成 熟, FMCW 激光雷达将和 ToF 激光雷达在市场上并存。

3.2.3. 激光发射:看好 EEL 向 VCSEL 发展,建议关注 PCSEL 发展态势
激光器是发射激光的装置,主要有边缘发射激光器 EEL、垂直腔面发射激光 器 VCSEL 、光子晶体结构表面发射激光器 PCSEL 三种主流方向。
技术不断迭代下 VCSEL 发光功率有望升高,看好多结 VCSEL 的发展潜力。 EEL 的光斑为椭圆形,特点是发光功率密度高,但因为发光面在半导体晶圆的侧 面,使用过程中需要经过切割、翻转、镀膜、再切割的工艺步骤,并且对人工装调 技术要求高,每一颗激光器都需要使用分立的光学器件进行光束发散角的压缩和 调装,导致成本高企且难以保证一致性。垂直腔面发射激光器 VCSEL 的光斑近似于圆形,VCSEL 从垂直衬底的面发射激光,激光器阵列容易与平面化的电路芯 片键合,并且由半导体加工设备保障精度,不需要像 EEL 一样对每个激光器进行 单独装调,并且容易和面上工艺的硅材料微型透镜进行整合从而提升光束质量。 由于 VCSEL 激光器的发光密度功率较低,导致探测距离受限(通常小于 50m), 此前只能应用于对测距要求不高的领域。近年来由于技术迭代,国内外多家 VCSEL 激光器公司开发了多层结 VCSEL 激光器,提升其发光功率密度将近 5- 10 倍,为长距离探测激光雷达提升了可能性。技术进步叠加平面化下的生产成本 和产品可靠性的优越,VCSEL 的使用渗透率未来有望逐步提升并超越 EEL。
PCSEL 性能优越,建议关注 PCSEL 未来发展动向。光子晶体表面发射半导 体激光器(PCSEL)是垂直腔面发射激光器(VCSEL)和边缘发射激光器(EEL) 的集成。VCSEL 坚固耐用,但波长范围和功率有所打折扣;EEL 波长范围宽广, 然而制造成本高、容易损坏;相较之下,PCSEL 优势明显,兼具成本低、坚固耐 用、宽波长范围和高功率的优点。目前 Vector Photonics 已经在研发、实验室环 境和商业工厂中证明了其革命性的、专有的 PCSEL 技术,正在将关键的设计和工 艺知识转移到工业环境中,进行大批量生产。随着未来 PCSEL 技术商业化,或将 成为新的发展方向。

根据激光发射器使用的光源波长可以主要分为 905nm 和 1550nm 两类激光发射器。 采用波长为 1550nm 激光的激光雷达的功率十分高,探测的距离也更长。但 由于波长为 1550nm 的光线远离人眼吸收的可见光光谱,因此相对于 905nm 波 长的激光器,同等功率的 1550nm 激光雷达对人眼视网膜的安全性更高。1550nm 的光纤激光器一般需配合 FMCW 的技术,在检测距离的同时还可以利用多普勒频 检测物体的速度。
与 905nm 激光雷达相比,1550nm 激光雷达的光源及探测器成本、供应链成 熟度上仍有一定的差距。从成本和供应链成熟度上看,905nm 边缘射半导体激光 器基于 InGaAs/GaAs 材料,成本低、技术成熟,是大批量应用的必然选择,性价 比更高。1550nm 光纤激光器功率大,光束质量也更好,但需要使用的材料是 InP 而不是硅 CMOS,并且需要外部电源和复杂的电子控制装置。在探测器端,905nm 的激光器可以使用成本更低的硅探测器,而使用 1550nm 光纤激光器的激光雷达 系统无法搭配常规的硅探测器,需要与昂贵的 InGaAs 探测器配对使用,而 InGaAs 材料的成本比硅基材料贵将近 10 倍,因此 1550nm 激光器的价格更加昂贵,成本 在短期内难以降低。
3.2.4. 激光探测:从 PD/ APD 向 SPAD /SiPM 进发
SPAD 和 SiPM/MPPC 在增益能力、大尺寸阵列的实现和易用性上较 APD 更加优越。PIN PD 光电二极管目前仅适用于 FMCW 测距激光雷达。APD 雪崩光 电二极管技术较为成熟,是使用最为广泛的光电探测器件。目前 APD 的典型增益 是 10-100 倍,在进行远距离测试时需大幅提高光源光强才能确保 APD 有信号。 SPAD 单光子雪崩二极管和 SiPM/MPPC 硅光电倍增管主要是为了解决增益能力 和大尺寸阵列的实现而存在:1)SPAD 或者 SiPM/MPPC 是工作在盖革模式下的 APD,理论上增益可达到 APD 的 100 万倍以上,但系统成本与电路成本均较高; 2)SiPM/MPPC 是多个 SPAD 的阵列形式,可通过多个 SPAD 获得更高的可探测 范围以及配合阵列光源使用,更容易集成 CMOS 技术,具备规模量产的成本优势。 此外,由于 SiPM 工作电压大多低于 30V,不需要高压系统,易于与主流电子系 统集成,内部的百万级增益也使 SiPM 对后端读出电路的要求更简单。市场对于 SiPM/MPPC 主要的诉求是 PDE(光子探测效率)的提升。目前,SiPM 广泛应用 于医疗仪器、激光探测与测量(LiDAR)、精密分析、辐射监测、安全检测等领域, 随着 SiPM 的不断发展将拓展至更多的领域。禾赛科技、Innovusion、Ouster 等 主流厂商均已布局 SiPM 相关技术,未来有望代替 APD。

3.2.5. 信息处理方式:主流方案为 FPGA,看好 SoC 的长期发展
SoC 高度集成不同模块,未来或将替代 FPGA 成为主流选择方案。激光雷达 目前通用的主控芯片为 FPGA 芯片,国内主要供应商有紫光同创、安路科技、高 云半导体、复旦微电等,国外主要供应商有赛灵思、英特尔等。国外供应商的产品 性能优越,大幅领先国内供应商,但目前国内产品的逻辑资源规模和高速接口性 能也可满足激光雷达的需求。除了 FPGA 外,激光雷达主控芯片还可以选用高性 能单片机(MCU)、数字信号处理单元(DSP)来代替。MCU 的国际主流供应商 有瑞萨、英飞凌等,DSP 的主流供应商有德州仪器、亚德诺半导体等。由于单光 子接收端片上集成芯片(System on Chip,SoC)可以通过片内集成探测器、前 端电路、算法处理电路、激光脉冲控制等模块直接输出距离和反射率信息,未来 或将逐步替代主控芯片 FPGA 的功能。未来随着线列、面阵规模的不断增大,逐 步升级 CMOS 工艺节点,单光子接收端 SoC 将实现更强的运算能力、更低的功 耗和更高的集成度。
4. 单价下探利好需求释放,上游国产品牌迎接发展机遇4.1. 技术革新 行业需求增多,激光雷达单价不断下探有望迎来行业拐点
技术迭代革新,政策扶持,叠加激光雷达规模效应分摊成本,激光雷达单价 不断下探。当前激光雷达行业发展仍处于成长早期。作为 L3 级别自动驾驶传感 器的关键,激光雷达有望伴随车载前装量产上车的进程,迎来行业向上拐点,奏 响以成本降低为特征的技术革新主旋律。
机械式激光雷达单价仍然高企,半固态、固态方案单价下探趋势明显。早期 的机械式激光雷达体积大、价格昂贵。随着技术的不断推陈出新,半固态激光雷 达通过微动元件的使用减少机械运动的部件减小激光雷达体积,固态激光雷达的 关键元件通过采用半导体工艺不断优化性能,在激光雷达整体体积更小的同时成 本也逐渐降低。目前激光雷达发展历程逐渐从价格高昂、模拟信号输出、机械旋 转式的初始阶段,向价格更低、数字信号输出、关键元件固态化的激光雷达发展。

从硬件到算法,软硬件融合或将成为激光雷达厂商的重要竞争力。对于激光 雷达供应厂而言,在为车型制造开发出相应的激光雷达硬件后,还需要较强的软 件实力来提供配套的感知算法。与自动驾驶系统算法一样,激光雷达感知算法也 需要大量的数据对算法进行训练和迭代,以提高算法的准确性,对于整体激光雷 达的系统安全性、检测率和准确度的重要性不言而喻。在算法的加持下,激光雷 达对于场景的感知理解将有望实现从“看见”到真正的“看懂”的转变,同时还能 进一步降低激光雷达成本。目前,业内逐渐显现出激光雷达供应商从单一的硬件 供应商向集成方案系统供应商转型的趋势,未来激光雷达赛道或将成为软硬件融 合的一体化解决方案的比拼。中国的速腾聚创、阿里巴巴达摩院均在此领域有所 布局。
政策扶持,叠加激光雷达放量分摊成本,市场整体预期良好。2017 年,工信 部发布《智能传感器产业三年行动指南(2017-2019)》,明确指出面向消费电子、汽 车电子、工业控制、健康医疗等重点行业领域,开展智能传感器应用示范。同年发 布的《促进新一代人工智能产业发展三年行动计划(2018-2020)》,设定了激光雷 达设计、生产工艺达到国际领先水平的目标。激光雷达是 L3 及以上自动驾驶汽 车的关键传感器,伴随 L3 汽车逐步量产,激光雷达将迎来市场放量。更多车辆开始倾向于使用激光雷达,推动技术成熟、成本下降,更加体现激光雷达竞争优势, 然后产量进一步增加,规模效应后分摊了成本,进入良性循环。根据沙利文研究 报告的数据预测,2025 年我国车载激光雷达市场规模将达近 43 亿美元。
激光雷达的总成本=BOM 成本 生产成本 研发成本,基于构造不同,不同激 光雷达 BOM 成本拆分略有不同,收发器件为主要的成本端。参考汽车之心、 Systemplus Consulting 对不同激光雷达种类的 BOM 拆解: 机械式激光雷达激光发射器、接收器 BOM 成本达 75%。Velodyne VLP-16 的 BOM(大约 1000 美元)拆分为:激光器探测器(75%)、光学部件(10%)、 电路板(10%)、电机外壳及结构件(5%)。
半固态激光雷达 BOM 成本中收发器件及主板占比较大。法雷奥 SCALA 1 转 镜式激光雷达的 BOM 大约 300 美元,其中主板占比 45%,收发器件占比近 50%: 主板(45%)、激光单元板(23%)、机械镜单元(13%)、机械激光单元(10%)、 封装壳(8%)、电机单元板(1%)。法雷奥 Scala 1 为 4 线激光雷达,年产量达十万级。若产品迭代至 Scala 2,激光扫描线束则由 4 线升级为 16 线,需要增加 12 套发射与接收器件,成本上增加约 400 美元。

4.2. 海外龙头垄断上游芯片市场,收发及光学元件领域国产品牌崛起
激光雷达上中下游产业链逐渐完备,行业呈现“百花齐放”态势。激光雷达产 业链由上游(电子和光学元器件)——中游(激光雷达整机)——下游(多样化应 用场景)组成。在行业上游,激光雷达组成复杂,涉及零部件繁多,直接和间接供 应商数量庞大;行业中游竞争激烈,国内外品牌争相发力,且由于激光雷达技术 路径较多、未来适用领域广泛,差异化产品也纷纷涌现,市场价格方面竞争激烈; 行业下游,多样化的应用场景、多种类型的科技公司也不约而同地受到了激光雷 达红利的辐射。
上游:欧美品牌率先发力水平领先,国产品牌奋力追赶前景乐观。激光雷达 上游主要为光学、电子元器件制造厂商,元器件按功能共分为四大类,包括激光 发射(如固体激光器、半导体激光器 EEL/VCSEL、光纤激光器等)、激光接收-探 测器(如雪崩光电二极管 APD、单光子雪崩二极管 SPAD、硅光电倍增管 SiPM 等)、扫描系统(如旋转电机、滤光片与透镜等)、信息处理系统(如 FPGA 芯片、 放大器、数模转换器等);此外还涉及位置和导航系统(GPS、IMU)和有色金属 材料等相关产业。
发射端激光器与接收端探测器:常年海外领先,近年国产品牌多领域发力寻 求超车。由于海外供应商在激光发射器和接收端探测器领域耕耘已久,目前此领 域主要由日欧美等海外厂商主导。1)发射端激光器代表企业包括国外的 OSRAM (欧司朗)、AMS(艾迈斯半导体)、Lumentum(鲁门特姆)、纵慧芯光等,以及 国内的炬光科技、长光华芯、光库科技等。国内激光器厂商起步较晚但奋力追赶, 相关产品性能已逐步接近海外水平,有望加速国产替代。2)接收端探测器全球寡 头垄断格局明显,主要由滨松、安森美、索尼等厂商布局全面并主导市场。国内 供应商起步稍晚但发展势头迅猛,凭借较高性能及成本优势可与海外厂商较量, APD 领域主要有中电科 44 所布局;灵明光子、南京芯视界、宇称电子等国内厂 商则前瞻性地推动 SPAD、SiPM 等新技术发展。
扫描-光学元件:国内成本优势明显,老光学厂商借此切入新赛道。光学元件 及组件一般由激光雷达公司自主研发设计,然后选择光学元件厂商进行生产加工。 技术成熟且量产的 MEMS 微振镜企业仍大多集中在国外,如滨松、 Mirrorcle、 MicroVision;但中国企业近年紧跟步伐,知微传感、Opus 等企业不断追赶并实 现突破。而镜头、滤光片等光学部件可充分利用国内供应链完善和低成本的优势,舜宇光学、腾景科技等精密光学元器件厂商已经可以替代国外供应链和满足产品 加工的需求;永新光学与禾赛、Innoviz 等多家海内外激光雷达厂商合作,光学镜 头及光学元器件产品广泛应用于机械旋转式、半固态式、固态式车载激光雷达, 且已进入麦格纳的指定产品供应商名单;舜宇光学也与华为、大疆等知名品牌合 作,且已加入 Leddar 生态系统。同时,天孚通信、昂纳科技等光通信厂商凭借原 有的光通信技术积累切入激光雷达赛道,实现创新与突破。
中游:产品形态多样,行业格局未定。激光雷达中游主要为激光雷达集成品 制造商,因激光雷达壁垒相对较高,各激光雷达厂商技术路线存在差异化,故整 个行业仍处于各家积蓄实力加速推出车规级产品的阶段,行业竞争尚处早期。海 外厂商包括法雷奥、Velodyne、Ibeo、Innovusion、Innoviz 等先驱企业,国内 厂商包括发展迅猛的速腾聚创、禾赛科技、镭神智能、华为等企业。从产品类型 来看,目前的激光雷达主要有机械式(Velodyne 、 Quanergy 等)、半固态-转镜 式(法雷奥、Innovusion 等)、半固态-棱镜式(大疆等)、半固态-MEMS 式(Innoviz、 Luminar 等)、固态-Flash 式(大陆、Ibeo 等)、固态-OPA 式(Quanergy 等)、 固态-FMCW(Aeva 、Blackmore 等)七大细分类型。目前半固态激光雷达仍为 车载激光雷达主流,而固态激光雷达被视作最终进化方向,前景广阔。
下游:分布行业广泛且富有科技前景,中下游市场地位将会逐步对等。激光 雷达下游应用分布广泛, 主要有无人驾驶、高级辅助驾驶、机器人、车联网、测 绘、高精度地图、消费服务业等领域,目前整体激光雷达下游市场供不应求,呈现 卖方市场的景象,对下游有较强定价权和议价能力。激光雷达整体盈利空间较大, 随着厂商竞争的激烈加剧、技术的升级迭代,市场或将更加趋于平衡。当前合作 商覆盖多科技领域,其中行业巨头、产业先驱者众多(如 GM Cruise、Uber、 TomTom、小马智行、百度、阿里巴巴等),未来随着技术进一步取得突破、成本 进一步下降,将会有更多国内外高新技术产业与公司直接或间接地受益。(报告来源:未来智库)
5. 产业链上中游百家争鸣,小荷才露尖尖角5.1. 炬光科技:领航国内高功率半导体激光器,激光雷达打开下游成长空 间
“产生光子”组合“调控光子”,由上游向中游应用领域逐步扩展。炬光科技 成立于 2007 年 9 月,起步于上游的“产生光子”的高功率半导体激光器,2017 年通过并购 LIMO 拥有“调控光子”的技术能力,并通过研发、市场、销售的战 略整合和相互结合拓展光子技术应用解决方案。公司全球首创线光斑激光雷达技 术,高筑核心技术壁垒,其高功率半导体激光器业务已位列国内龙头,并逐渐拓 展至中游进行大规模商用化布局。公司是激光赛道上游的首家上市公司,占据激 光产业核心位置,主营业务包含半导体激光、激光光学产品、汽车应用(激光雷 达)和光学系统四大业务。
公司核心技术众多,研发实力领先。公司现已自主研发形成共晶键合技术、 热管理技术、热应力控制技术、界面材料与表面工程、测试分析诊断技术、线光斑 整形技术、光束转换技术、光场匀化技术(光刻机用)和晶圆级同步结构化激光光 学制造技术九大类核心技术。2018-2020 年期间累计研发投入占累计营业收入的 比例达到 18.99%;累计研发投入金额约 1.99 亿元。截至 2021 年 6 月 30 日,公 司共拥有已授权专利达到 405 项,包括美国、欧洲、日本、韩国等境外专利 110 项,境内发明专利 117 项、实用新型专利 150 项和外观设计专利 28 项;公司 研发人员为 154 人,占员工总人数比重达 23.05%。

5.2. 禾赛科技:主营机械式激光雷达,向车规级半固态激光雷达迈进
机械式激光雷达方案领军企业,开发车规级半固态激光雷达完善产品矩阵。 禾赛科技于 2014 年创立,是全球领军的自动驾驶激光雷达制造商,也是全球为数 不多交付上万台激光雷达的厂商之一,2019 年生产 5408 台激光雷达,2020 年前 三季度共生产 4270 台。公司拥有极强的车规级规模化生产能力,产能处于领先地 位,投资近 2 亿元打造的年产能百万台的工厂“麦克斯韦”智造中心将于 2022 年 投产。公司主营业务为研发、制造、销售高分辨率 3D 激光雷达(核心产品)以 及激光气体传感器产品,激光雷达业务占比达 70%以上,产品系列多样,涵盖长 中短距各种不同类型的激光雷达产品,性能领先,主要产品包括 Pandar 系列、 QT 系列和 XT 系列,并开拓车规级半固态式产品 AT128 完善产品矩阵,从机械 式激光雷达拓展至半固态激光雷达。
公司产品广受主流汽车厂商和机器人公司认可。公司产品为无人驾驶出租车、 无人驾驶卡车、高级驾驶辅助系统(ADAS)、无人配送机器人和其它工业应用提 供了丰富的解决方案,其中新款半固态激光雷达产品 AT128 已获得包括理想、集 度、高合、路特斯在内的多家汽车厂商总计超过数百万台的定点,预计 2022 年将 实现大规模量产交付。公司产品性能优越、可靠性和可量产的设计,已受到全球 主流自动驾驶公司和汽车厂商、一级供应商及机器人公司的认可,包括百度、滴 滴、美团、Nuro、Zoox、英伟达、图森未来、文远知行、小马智行、AutoX、Kodiak 等,客户遍及全球 40 个国家、90 多个城市。

5.3. 速腾聚创: 智能激光雷达系统科技龙头,量产车规级 MEMS 激光雷 达迎接业绩释放
智能激光雷达系统科技领先企业,汽车和工业市场应用市场份额领衔。速腾 聚创成立于 2014 年,总部位于深圳,是全球领先的智能激光雷达系统科技企业, 通过激光雷达硬件、AI 算法与芯片三大核心技术闭环,通过精准的趋势预判和领 先的技术水平,提供多种智能激光雷达系统解决方案。据全球知名市场研究与战 略咨询公司 Yole Développement,速腾聚创在汽车和工业市场应用的份额占全 球市场 10%,排名中国第一、世界第二。
从机械式激光雷达向车规级 MEMS 激光雷达量产能力升级。公司主营业务从 机械式激光雷达拓展至 MEMS 激光雷达及感知软件和系统解决方案,已实现领先 全行业交付全球首款车规级智能 MEMS 激光雷达 RS-LiDAR-M1 的量产,未来 MEMS 激光雷达份额有望迎来高速增长。自 2020 年 7 月份以来,公司第二代智 能固态激光雷达 RS-LiDAR-M1 获得大量车企定点车型订单,包括 L3 重卡方案科 技企业、北美新能源车企、中国造车新实力与新势力车企、传统主机厂、顶级超跑 品牌等,覆盖了从超跑到家用车、从乘用车到商用车的多种车型。其中,广汽埃安 已于今年 7 月份官宣多款车型定点搭载公司激光雷达。
5.4. 长光华芯:半导体激光芯片龙头,纵横发展加速版图扩张
公司率先开发高功率系列,培育 VCSEL 和光通信领域已久。公司专注于半 导体激光产业,聚焦半导体激光芯片、器件和模块等激光产业核心部件的研发、 制造和销售,紧跟下游市场的发展趋势,不断创新生产工艺,布局产品线。公司已 经形成了由半导体激光器芯片、器件、模块和直接半导体激光器组成的四大类、 多系列的产品矩阵,是半导体激光行业的垂直产业链公司。公司也已建成 IDM 工 艺平台和 3 英寸、6 英寸量产线,涵盖芯片设计、外延生长、晶圆加工(光刻)、 脱膜/镀膜、封装测试、光纤耦合等环节。
依托边缘发射芯片的技术水平,向面发 射芯片拓展,从 GaAs(砷化镓)材料体系到 InP(磷化铟)材料体系,构建了边 发射和面发射结构的技术平台,从而横向拓展了高效 VCSEL 芯片产品和光通信 芯片产品。公司自主研发的高功率半导体激光器芯片、器件和模块在先进制造业 等领域得到广泛应用,填补了国内高端半导体激光器芯片和器件的空白,解决了 我国大功率激光器领域的 "卡脖子 "问题,促进了半导体激光器芯片和器件关键技术指标的全面提升,提升了半导体激光芯片及器件各项关键技术指标升。同时 促进高功率固体激光器、光纤激光器、超快激光器等激光器核心芯片的国产化和 自主化。
A 股首支激光芯片股即将登陆科创板,募资助力巩固公司的核心技术能力。 长光华芯的 IPO 募集资金将重点投向科技创新领域,用于 "高功率激光芯片、器 件、模块产能扩建项目"、"垂直腔面发射半导体激光器(VCSEL)及光通讯激光芯 片产业化项目 "和 "研发中心建设项目"。借助登陆资本市场,公司将进一步加大 研发投入,开展半导体激光器芯片及高效泵浦技术、光纤耦合半导体激光器泵浦 源模块技术、大功率高可靠性半导体激光器封装技术等激光领域的前沿技术研究, 打造可以持续领先的研发能力和新方向拓展能力,助力创新高功率激光技术的发 展。

(本文仅供参考,不代表我们的任何投资建议。如需使用相关信息,请参阅报告原文。)
精选报告来源:【未来智库】。未来智库 - 官方网站
,




