
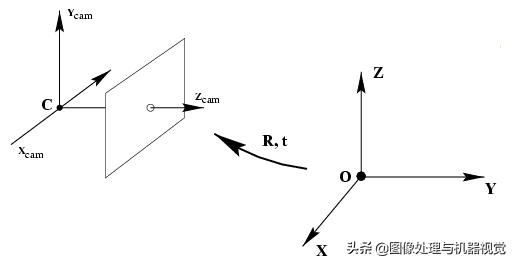
摄像机标定(Camera calibration)简单来说是从世界坐标系换到图像坐标系的过程,也就是求最终的投影矩阵的过程。一般来说,标定的过程分为两个部分:第一步是从世界坐标系转为相机坐标系,这一步是三维点到三维点的转换。第二步是从相机坐标系转为成像平面坐标系(像素坐标系),这一步是三维点到二维点的转换。
在机器视觉、图像测量、三维重建等应用中,为校正镜头畸变,确定物理尺寸和像素间的换算关系,以及确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,需要建立相机成像的几何模型。通过相机拍摄带有固定间距图案的阵列平板、经过标定算法的计算,可以得出相机的几何模型,从而得到高精度的测量和重建结果。














