开始进行ROS开发前要首先进行基础环境配置,《ROS机器人编程-原理与应用》上配套的示例采用的是 Linux Ubuntu 14.04 ROS Indigo,由于本身是Windows系统,所以需要安装 VirtualBox 来设置虚拟的 Linux 环境,以便在不影响原操作系统的情况下运行。
一.安装 VirtualBox- VirtualBox下载地址:
https://www.virtualbox.org/wiki/Downloads
- 这里下载最新版本即可,完成后进行安装
- 下载地址:
https://releases.ubuntu.com/14.04/
- 14.04 属于早期版本,官网进入的话,在下载页面点击“Ubuntu Desktop”,然后找到 “see our alternative downloads”,然后下一页面选择 “Past releases”,下一页面,可以看到更多的版本及镜像,建议下载镜像种子文字,然后用迅雷下载速度更快一些

- 下载完成后打开 VirtualBox 新建虚拟机,选择刚刚下载好的镜像,设置系统配置(默认配置即可,后续可根据实际需求再进行调整),耐心等待系统安装完成
- 设置共享粘贴板,在操作一些命令时会比较方便

如果设置后不起作用,可通过选择设备-安装增强功能,安装完成后重启虚拟机

- 安装教程:
http://wiki.ros.org/indigo/Installation/Ubuntu
1.执行命令时提示 “user is not in the sudoers file”,这是因为用户没有授予sudo的权限,需要将其添加到/ect/sudoers文件中授权,完成后即可执行命令- 通过搜索找到 Terminal 并打开

- 执行命令 su - 切换到root用户,提示输入用户密码(密码和当前默认用户的密码一致)
- 编辑sudoers文件,为默认用户提升权限
gedit /etc/sudoers

- 在root ALL=(ALL:ALL) ALL下添加vboxuser ALL=(ALL:ALL) ALL保存文件后关闭(vboxuser 指的是需要授权的用户)

- 使用 exit 命令退出 root
- 设置软件源(Setup your sources.list),设置计算机接受来自 packages.ros.org 的软件(此处更改为国内镜像源,速度会更快一些)
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
- 执行完成后,可以在 /etc/apt/sources.list.d/目录下看到 ros-latest.list 文件
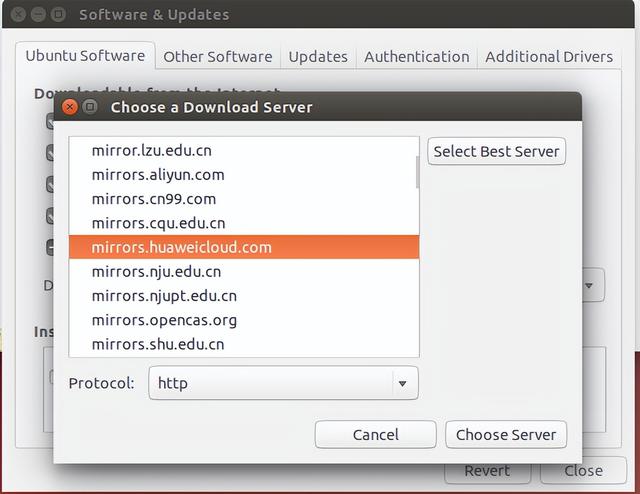
- 安装curl命令前,设置ubuntu软件与更新中的镜像源在 Download from 中选择 other

选择一个最佳的服务器
- 设置密钥(Set up your keys)
sudo apt install curl # 安装curl命令
- 安装curl完成之后,设置ROS的Key
curl -sSL 'http://keyserver.ubuntu.com/pks/lookup?op=get&search=0xC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654' | sudo apt-key add -
- 安装(Installation)首先,确保你的 Debian 软件包索引是最新的:
sudo apt-get update && sudo apt-get install dpkg
- 执行安装命令
sudo apt-get install ros-indigo-desktop-full
- 初始化rosdep(Initialize rosdep)在使用 ROS 之前,需要初始化 ROSdep。rosdep 使你能够轻松地为要编译的源代码安装系统依赖项,并且需要在 ROS 中运行一些核心组件。
sudo rosdep init
rosdep update
- sudo rosdep init失败问题解决在终端执行以下命令:打开hosts文件
sudo gedit /etc/hosts
添加映射 199.232.28.133 raw.githubusercontent.com
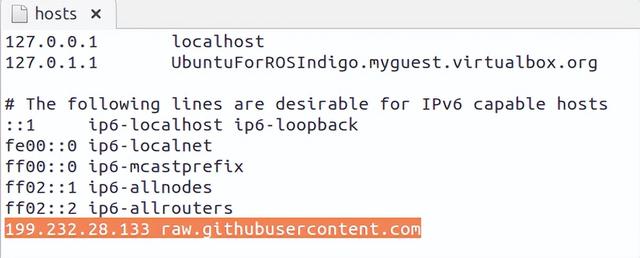
然后保存文件后退出,再重新执行 sudo rosdep init
- 设置环境变量(Environment setup)
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
source ~/.bashrc
- 获取rosinstall(Getting rosinstall)
sudo apt-get install python-rosinstall
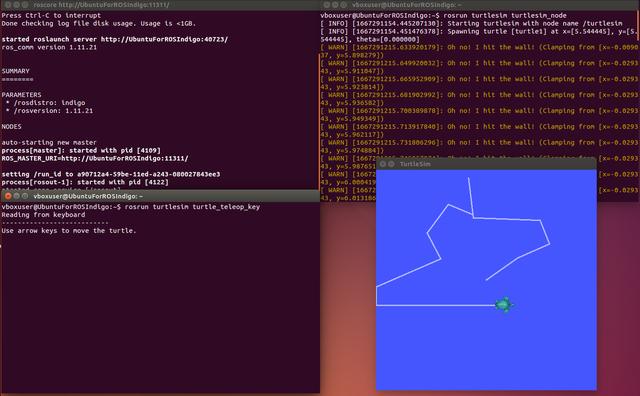
- 使用基本命令检查ROS是否安装成功。以下三条命令分别打开一个终端进行运行。
roscore #启动roscore
rosrun turtlesim turtlesim_node #启动小海龟仿真器
rosrun turtlesim turtle_teleop_key #启动海龟控制节点